5.4.2.4.1.1. Алгоритм
Алгоритм предназначен для регулирования технологических параметров в автоматическом или ручном режимах.
Задачей алгоритма является в зависимости от режима работы: обеспечение постоянства (стабилизация) входного технологического параметра или поддержание входного параметра в соответствии с рассчитываемым заданием или соотношением.
1. Стабилизация положения. Дистанционный режим управления. Задается в паспорте регулятора в % для исполнительных механизмов или оборотах частотного привода.
2. Стабилизация технологического параметра (уровня, расхода, давления, плотности и т.д.). Автоматический режим управления. Задается в паспорте регулятора в технологических единицах измерения (м, м3/ч, бар и т.д.)
3. Регулирование технологического параметра с коррекцией дополнительно по другим возмущающим воздействиям или расчетным формулам, таблицам соотношения и т.д. В простом варианте к регулятору стабилизации технологического параметра добавляется корректировка к заданию по дополнительному параметру. Коэффициенты корреляции или выбираются из технологическим карт (мат.модели) при наличии, или подбираются опытным путем при пуско-наладке (менее точная модель).
Технологические и электрические блокировки выключают автоматический режим работы регулятора с выдачей соответствующей сигнализации.
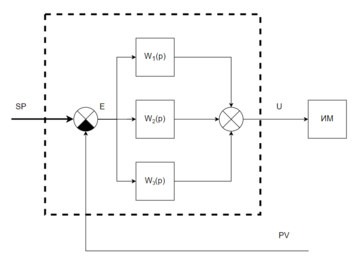
В общем случае структурная схема аналогового регулятора выглядит следующим образом:
Передаточная функция аналогового регулятора описывается следующим выражением:
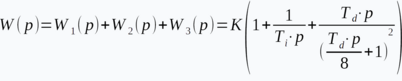 |
Управляющий сигнал U рассчитывается по формуле:
Пропорциональная часть рассчитывается по формуле:
где E – ошибка регулирования.
|
Интегральная часть рассчитывается по формуле:
где E – ошибка регулирования.
|
Дифференциальная часть рассчитывается по формуле:
где E – ошибка регулирования.
|
Действующее задание определяется суммой текущего номинала (задания оператора или каскадного регулятора) и коррекции. Ограниченно в заданном диапазоне LMN_MIN…LMN_MAX.
Рассогласование рассчитывается как разность задания и параметра.
Тип алгоритма можно выбрать двух типов:
компенсационный, который предназначен для объектов, поведение которых соответствует апериодическому звену первого порядка;
ПИД.
Тип управления клапаном также можно выбрать из двух типов:
ШИМ, когда формируются управляющие импульсы на выходах QLMNUP и QLMNDN.
Аналоговый, когда управление клапаном осуществляется аналоговым выходным сигналом QLMN.
Если на входе FEED не привязан сигнал положения можно выставить флаг SIM_ON в значение TRUE, тогда внутри алгоритма будет происходить имитация сигнала положения в зависимости от выхода QLMN.
Настройка ШИМ
При типе управления клапаном в режиме ШИМ можно также выбрать режим работы ШИМ при помощи настроечной переменной PWM_MODE.
Если PWM_MODE = 1, то ШИМ будет работать в режиме генератора импульсов и импульсы будут генерироваться в зависимости от переменных PULSE_TM и PAUSE_TM.
Если PWM_MODE = 0, то ШИМ будет рассчитывать длительность импульса в зависимости от времени хода клапана MTR_TM.