
5.5.2.3.8.1.1. Алгоритм
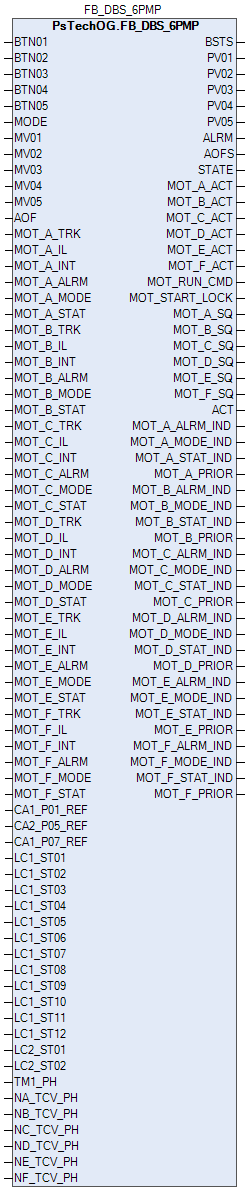
Технологический функциональный блок FB_DBS_6PMP выполнен на основе базового функционального блока PBS5C.
Данный типовой элемент описывает управление насосной станции, состоящей из 6 насосов.
Насос рассматривается, как
РАБОЧИЙ, когда он находится в рабочем состоянии, если требуется только один насос.
РЕЗЕРВНЫЙ, когда он находится в рабочем состоянии, если требуется дополнительный насос.
ЗАПАСНОЙ, если он запускается в работу при отказе рабочего или резервного насоса.
Блок FB_DBS_6PMP реализует работу АВР насосной станции, состоящей из шести насосов, и может применяться с программными модулями:
блоками моторов;
программными модулями более высокого уровня.
Список доступных режимов функционального блока FB_DBS_6PMP:
Список доступных тревог функционального блока FB_DBS_6PMP:
Нормальное состояние (NR)
Функциональная блок-схема
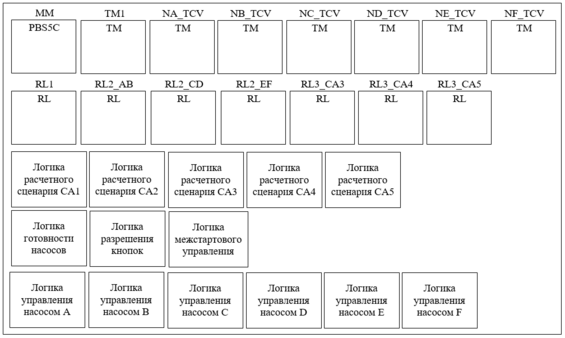
Состав элементов блока:
Блок MM базового типа PBS5C используется для реализации переключения режимов РУЧН/КАСКАД DBS и подачи команд ПУСК /ОСТАНОВ DBS.
Блок RL3_CA5 базового типа RL используется для расчета состояния насосов "Доступен в работе" и "Недоступен".
Подпрограмма логики расчетного сценария CA1 используется для обработки значения требуемого количества насосов.
Подпрограмма логики расчетного сценария CA2 используется для обработки значения схемы АВР насосов.
Подпрограмма логики расчетного сценария CA3 используется для расчета количества насосов с приоритетом "Доступно".
Подпрограмма логики расчетного сценария CA4 используется для расчета количества насосов с приоритетом "Доступно в работе".
Подпрограмма логики расчетного сценария CA5 используется для расчета количества насосов с приоритетом "Доступна работа" или "Недоступно".
Подпрограмма логики готовности насосов используется для формирования признаков готовности насосов.
Подпрограмма логики разрешения кнопок используется для управления разрешением/запретом работы кнопок лицевой панели блока MM.
Подпрограмма логики межстартового управления используется для реализации межстартового алгоритма.
Подпрограмма логики управления насосом A представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса A.
Подпрограмма логики управления насосом B представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса B.
Подпрограмма логики управления насосом С представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса С.
Подпрограмма логики управления насосом D представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса D.
Подпрограмма логики управления насосом E представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса E.
Подпрограмма логики управления насосом F представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса F.
Основные функции
управление моторами в соответствии с их приоритетами РАБОЧИЙ / РЕЗЕРВНЫЙ / ЗАПАСНОЙ;
возможность вызова рабочего окна моторов (ПУСК/ОСТАНОВ, индикация состояния и неисправности, изменение режима мотора);
прием сигналов от вышестоящей логики (число требуемых насосов);
предоставление для оператора интерфейса для управления АВР (команда пуска / останова и изменение режима АВР, число требуемых насосов, схема АВР).
Подробное описание
Если АВР переведен в режим КАСКАД, то работой DBS и выбором требуемого количества насосов управляет вышестоящая логика. Команда ПУСК выдается, когда требуемое количество насосов не равно нулю, и команда ОСТАНОВ выдается, когда требуемое количество насосов равно нулю. Когда насосная установка работает в режиме КАСКАД, у оператора нет доступа к команде пуска / останова АВР.
Если АВР переведен в режим РУЧНОЙ, то команды пуска / останова DBS и требуемое количество насосов задаются от оператора.
Алгоритм вышестоящей логики (регулятор) осуществляет автоматическое вычисление требуемого количества насосов при работе АВР в режиме КАСКАД, основываясь на значениях расчетных и измеренных параметров и в соответствии с технологическим процессом. Требуемое количество насосов может быть равно шести.
Оператор может изменить схему АВР (приоритет насосов), задав порядок приоритетности на HMI в числовом виде (например, 321456).
Если команда пуска АВР активна, на экране HMI состояние будет отображаться как «активное» (ACTIVE), в противном случае — как «состояние бездействия» (IDLE).
Внутренний межстартовый таймер используется для реализации временного интервала между запусками насосов в случае их одновременного пуска.
Внутренний таймер перекрытия используется для реализации задержки до останова менее приоритетного насоса после запуска более приоритетного насоса при их переключении. Для каждого насоса используется индивидуальный таймер перекрытия.
Изменение требуемого количества насосов:
При уменьшении значения требуемого количества насосов происходит останов менее приоритетного насоса;
При уменьшении значения требуемого количества насосов до нуля АВР передает команду на останов и все работающие насосы останавливаются. Требуемое количество насосов может изменяться до нуля либо вышестоящей логикой (DBS находится в режиме КАСКАД) или оператором (DBS находится в режиме РУЧНОЙ).
При изменении схемы АВР (приоритета насосов) во время его работы происходит автоматическое переключение насосов, а именно запуск более приоритетного насоса и останов менее приоритетного.
При нахождении более приоритетного насоса в состоянии неготовности происходит запуск менее приоритетного.