5.5.2.1.5.12. Обработка выхода в блоках управления моторами
Ниже перечислены типы специальной обработки выходного сигнала в блоке управления двигателем:
Задание управляющего выхода (MV)
Преобразование выходного сигнала
Шаговый выход
Дистанционный/местный вход
Отслеживание ответного сигнала
Проверка блокировки
Отслеживание выхода
Задание управляющего выхода (MV)
Метод задания значения управляющего выхода (М\/) зависит от режима блока управления моторами.
При работе блока в ручном режиме (MAN) значение управляющего выхода (MV) задается следующим способом:
Значение управляющего выхода (MV) задается со станции оператора АРМ;
Для выхода в шаговом режиме значение управляющего выхода (MV) задается автоматически на основе значения задания (SV), задаваемого со станции оператора АРМ.
При работе блока в автоматическом (AUT) или каскадном (CAS) режимах в качестве значения управляющего выхода (MV) устанавливается значение задания в каскадном режиме (CSV), задаваемое другим функциональным блоком, например, блоком логического управления или вычислительным блоком.
При работе блока в режиме удаленного вывода (ROUT) в качестве значения управляющего выхода (MV) устанавливается значение внешнего управляющего выхода (RSV), задаваемое удаленной подсистемой. Если режимом блока не является режим удаленного вывода (ROUT), то выполняется процедура отслеживания, в ходе которой значение внешнего задания (RSV) отслеживает значение выхода (MV).
При работе блока в режиме отслеживания (TRK) значение управляющего выхода (MV) задается следующим образом в зависимости от настройки конфигурационного параметра CONFIG.CONTR_CALC.ANSW_TRACK в среде Astra.IDE:
Если задана функция отслеживания ответного сигнала (значение TRUE), то в качестве значения управляющего выхода (MV) задается значение входа ответного сигнала (PV).
Если функция отслеживания ответного сигнала не задана (значение FALSE) и если в качестве преобразования выходного сигнала (параметр CONFIG.OUTPUT.SIGN_CONVERS типа ENUM_OUT_CONVERS в среде Astra.IDE) заданы значения ST2 или ST3, то производится считывание состояний выходных блоков и результат обратного преобразования выходного сигнала устанавливается в качестве значения управляющего выхода (MV).
Преобразование выходного сигнала
Для блоков управления моторами предусмотрены следующие типы обработки выхода:
|
Задание преобразования выходного сигнала
|
Число контактов выхода
|
Задание направления выходного воздействия
|
|
2-позиционый выход состояния (ST2)
|
1
|
Да
|
|
З-позиционый выход состояния (ST3)
|
2
|
Да
|
|
2-позиционый импульсный выход (PL2)
|
2
|
Нет
|
|
З-позиционый импульсный выход (PL3)
|
3
|
Нет
|
Тип преобразования выходного сигнала задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.SIGN_CONVERS типа ENUM_OUT_CONVERS, для которого возможны следующие значения:
ST2. 2-позиционный выход состояния (только для MC_2(E));
ST3. 3-позиционный выход состояния (только для MC_3(E));
PL2. 2-позиционный импульсный выход (только для MC_2(E));
PL3. 3-позиционный импульсный выход (только для MC_3(E));
При выборе значения ST2 или ST3 возможно задание направления выходного воздействия в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.ACT_DIR типа ENUM_DIR, для которого возможны следующие значения:
DIRECT. Прямое действие;
REVERSE. Обратное действие;
INV_DIR_ACT. Прямое действие при обратном соединении (только для MC_2 и MC_3);
INV_REV_ACT. Прямое действие при обратном соединении (только для MC_2 и MC_3);
При выборе значения PL2 или PL3 возможно задание длительности импульса в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 2-позиционного выхода состояния и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT(1)
|
|
Прямое
|
2
|
TRUE
|
|
0
|
FALSE
| |
|
Обратное
|
0
|
TRUE
|
|
2
|
FALSE
|
Действие 2-позиционного выхода состояния:
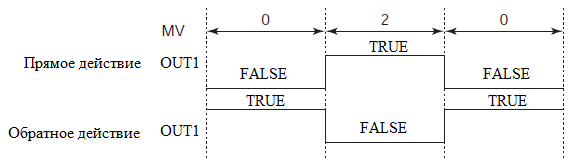
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 3-позиционного выхода состояния и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT1
|
Положение дискретного выхода
OUT2
|
|
Прямое
|
2
|
TRUE
|
FALSE
|
|
1
|
FALSE
|
FALSE
| |
|
0
|
FALSE
|
TRUE
| |
|
Обратное
|
2
|
FALSE
|
TRUE
|
|
1
|
TRUE
|
TRUE
| |
|
0
|
TRUE
|
FALSE
| |
|
Прямое действие при обратном соединении
|
2
|
FALSE
|
TRUE
|
|
1
|
FALSE
|
FALSE
| |
|
0
|
TRUE
|
FALSE
| |
|
Прямое действие при обратном соединении
|
2
|
TRUE
|
FALSE
|
|
1
|
TRUE
|
TRUE
| |
|
0
|
FALSE
|
TRUE
|
Действие 3-позиционного выхода состояния:
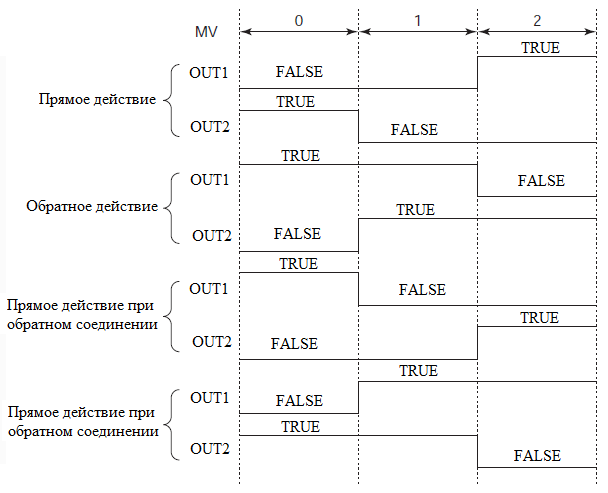
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 2-позиционного импульсного выхода и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT1
|
Положение дискретного выхода
OUT2
|
|
-
|
2
|
Импульс
|
FALSE
|
|
0
|
FALSE
|
Импульс
|
Рисунок ниже иллюстрирует действие 2-позиционного импульсного выхода:
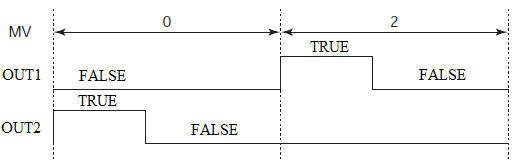
Для импульсного выходного сигнала время пребывания в состоянии TRUE задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 3-позиционного импульсного выхода и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного
выхода OUT1
|
Положение дискретного
выхода OUT2
|
Положение дискретного
выхода OUT3
|
|
-
|
2
|
Импульс
|
FALSE
|
FALSE
|
|
1
|
FALSE
|
FALSE
|
Импульс
| |
|
0
|
FALSE
|
Импульс
|
FALSE
|
Рисунок ниже иллюстрирует действие 3-позиционного импульсного выхода:
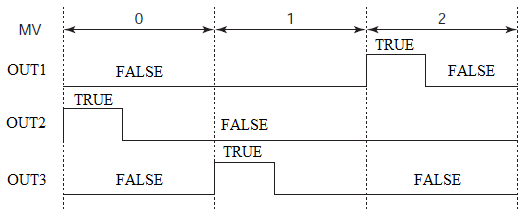
Для импульсного выходного сигнала время пребывания в состоянии TRUE задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Шаговый выход
Функция шагового выхода обеспечивает запуск и остановку двигателя на определенное время в соответствии с действиями оператора в ручном режиме в ходе выполнения рабочих операций и текущего контроля.
Шаговый выход инициируется при изменении значения задания (SV) для шагового выхода. Управляемая работа исполнительного элемента продолжается в течение времени (Тout), пропорционального изменению значения SV (ΔSV), начиная от 0 %, 50 % или 100 %.
По истечении времени Тout значение задания для шагового выхода соответствует значению управляющего выхода (MV) до момента его изменения. Работа функции шагового выхода возможна только в ручном режиме (MAN).
Когда функция шагового выхода не работает, значение задания для шагового выхода соответствует значению управляющего выхода (MV).
Таблица ниже иллюстрирует соответствие между значением управляющего выхода (MV) и значением задания для шагового выхода (SV):
|
MV
|
0
|
1
|
2
|
|
SV
|
0 %
|
50 %
|
100 %
|
Значение Тout рассчитывается по формуле:
 , ,где TOUT – время действия толчкового выхода, с;
Tf – продолжительность полного цикла работы шагового выхода, с;
ΔSV – изменение SV (%) = значение SV после изменения — значение SV до изменения.
|
Установка "Длительность полного хода в шаговом режиме" соответствует времени работы исполнительного элемента при изменении значения задания (SV) для шагового выхода на 100 % и задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INCH_FULL_STR.
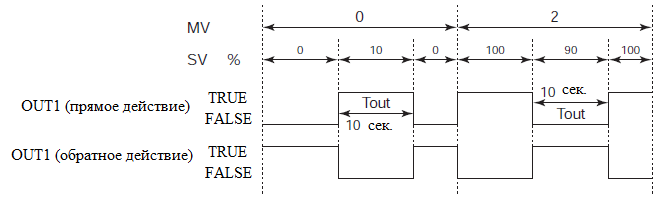
Действие шагового выхода для преобразования выходного сигнала типа "2-позиционный выход состояния" (ST2) состоит в реверсировании состояния дискретного выхода в течении времени Tout.
Рисунок ниже иллюстрирует действие 2-позиционного шагового выхода состояния (длительность полного хода = 100 сек.):
Действие шагового выхода для преобразования выходного сигнала типа "3-позиционный выход состояния" (ST3) состоит в следующем:
При MV = 2 выход OUT1 реверсируется в течении времени Tout;
При MV = 0 выход OUT2 реверсируется в течении времени Tout;
При MV = 1 реверсируется выход OUT1 в течении времени Tout, если изменение значения задания (ΔSV) для шагового выхода положительно или реверсируется выход OUT2 в течении времени Tout, если изменение значения задания (ΔSV) для шагового выхода отрицательно.
Действие шагового выхода для преобразования выходного сигнала типа "2-позиционный импульсный выход" (PL2) состоит в следующем:
При MV = 2 на выходе OUT2 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT1;
При MV = 1 на выходе OUT1 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT2.
Действие шагового выхода для преобразования выходного сигнала типа "3-позиционный импульсный выход" (PL3) состоит в следующем:
При MV = 2 на выходе OUT3 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT1;
При MV = 0 на выходе OUT3 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT2;
При MV = 1 формируется импульс на выходе OUT1 в случае положительного изменения значения задания (ΔSV) или на выходе OUT2 в случае отрицательного изменения значения задания (ΔSV) и по истечении времени Tout формируется импульс на выходе OUT3.
Дистанционный/местный вход
Функция дистанционного/местного входа состоит в считывании состояния локальных кнопочных переключателей (переключателей "МЕСТН."/"ДИСТ."), установленных вблизи оборудования, например, клапанов или насосов, и в предотвращении изменения выходных сигналов от блоков управления моторами, так как при работе системы в местном режиме местные операции обладают более высоким приоритетом.
Дистанционный/местный входной сигнал поступает через вход TSI блока управления моторами. Помимо дискретного входа, в качестве входа сигнала может также использоваться вход TSW_REF. Сигнал дистанционного/местного входа сохраняется на переключателе отслеживания (TSW).
Соответствие между дистанционным/местным входным сигналом и переключателем отслеживания:
|
Входной сигнал
|
Дистанционный/местный
|
TSW
|
Режим
|
|
FALSE
|
Дистанционный
|
FALSE
|
Любой кроме TRK
|
|
TRUE
|
Местный
|
TRUE
|
TRK
|
Когда вход TSI не подключен, данные могут передаваться непосредственно на переключатель отслеживания (TSW) со входа TSW_REF. При TSW = TRUE блок устанавливается в местный ручной режим (TRK). Когда TSW становится равным FALSE, блок возвращается в нормальный режим (MAN, AUT, CAS или ROUT).
Функция дистанционного/местного входа в режиме ручного управления по месту (TRK)
Действие функции дистанционного/местного входа в режиме управления по месту (TRK) выглядит следующим образом:
Выходное действие (преобразование выходного сигнала) не выполняется. Однако выходное действие выполняется, если задано отслеживание ответного сигнала при типе выхода "Выход состояния".
Проверка блокировки не выполняется.
Проверка ответного сигнала не выполняется, т.к. сбрасывается сигнализация ошибки ответного сигнала (ANS+, ANS-).
Отслеживание ответного сигнала
Функция отслеживания ответного сигнала заключается в принудительном приравнивании значения управляющего выхода (MV) к значению входа ответного сигнала (PV), когда блок находится в местном ручном режиме (TRK) или если переключатель команды байпаса (BPSW) находится в положении 4 (O_S).
Функция отслеживания ответного сигнала задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_ALC.ANSW_TRACK.
Проверка блокировки
Функция проверки блокировки используется для перевода блока управления мотором в состояние блокировки в соответствии с входным сигналом блокировки работы, подаваемым на вход IL блока управления мотором.
Функция проверки блокировки не работает в следующих условиях:
Состояние симуляции (SIM)
Режим ручного управления по месту (TRK)
Выдана команда байпаса функции проверки блокировки (BPSW = 2 (ITRLK) или 3 (ANSW_INTRLK))
При подаче команды на прекращение работы (при BPSW=4 (O_S))
|
Входной сигнал блокировки
Направление входного сигнала блокировки указывает на способ активации состояния блокировки: по состоянию TRUE или FALSE входного сигнала блокировки операций. Данный способ задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INTRLK_DIR, для которого возможны следующие значения:
DIRECT. Предусматривает активацию блокировки по состоянию TRUE сигнала блокировки.
REVERSE. Предусматривает активацию блокировки по состоянию FALSE сигнала блокировки.
Когда сигнал, подключенный ко входу IL, становится ненормальным (т.е. статус данных становится BAD), блок будет освобожден из заблокированного состояния независимо от того, является ли действие прямым или обратным.
|
Поведение выхода при активном статусе блокировки
В состоянии блокировки может выполняться предварительно заданное выходное действие.
Заданное выходное воздействие задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INTRLK_OUT, для которого возможны следующие значения:
CLOSE. Закрыть.
OPEN. Открыть.
STOP. Остановить.
При активации состояния блокировки наблюдается изменение выходного сигнала и после выполнения данного изменения в результате выходного воздействия предварительно заданного состояния блокировки срабатывает сигнализация блокировки (INT). При отключении блокировки происходит отключение сигнализации блокировки.
Если блок управления мотором находится в состоянии блокировки, то возможно удержание предыдущего значения управляющего выхода (MV). Эта функция может быть задана в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.HOLD_OUT. Если выбрано значение TRUE, то блок обеспечивает удержание предыдущего выхода в случае блокировки. Если выбрано значение FALSE, то блок обеспечивает изменение выхода в соответствии с выходным сигналом, обеспечивающим безопасное состояние и заданным в качестве параметра CONFIG.CONTR_CALC.INTRLK_OUT.
Отслеживание выхода
Отслеживание выхода представляет собой обработку выхода блоков МС-2Е и МС-ЗЕ.
Отслеживание выхода приводит значение управляющего выхода (MV) в соответствие со значением сигнала слежения от выходных блоков.
Отслеживание выхода запускается при переходе блока в режим IMAN.