
5.2.3.1.22. SYNCHDRV | СИНХРОПРИВОД
Алгоритм позволяет:
передавать клапанам управляющее воздействие с параллельной или шаговой синхронизацией;
включать/отключать синхронизацию в процессе управления, изменять её вид;
компенсировать разницу в настройке датчиков положения клапанов.
Синхронизация автоматически отключается, если хотя бы один из сигналов датчиков положения плохого качества.
|
Когда синхронизация отключена, клапанам постоянно направляется общее управляющее воздействие IN.
|
Режим синжронизации
|
Описание
|
|
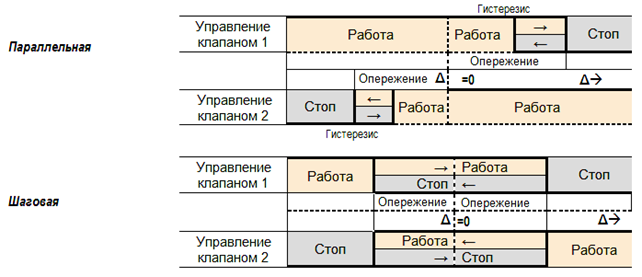
Параллельная
|
Клапаны управляются параллельно, причем ушедший вперед клапан приостанавливается.
|
|
Шаговая
|
Клапаны управляются поочередно
|
Диаграммы управления клапанами:
Смещение OFFSET - величина, компенсирующая различие сигналов датчиков положения. Определяется при закрытых клапанах как разность PI2– PI1.
Определение величины DELTA Δ:
|
DELTA Δ – текущая разность положений клапанов
| |
|
IN >= 0
|
DELTA = PI1.VALUE - PI2.VALUE + OFFSET
|
|
IN < 0
|
DELTA:= PI2.VALUE - PI1.VALUE - OFFSET
|
Требования останова клапана формируются при любом качестве входных сигналов. При отключенной синхронизации формируются, но не действуют.