5.5.2.3.3.1.1. Алгоритм
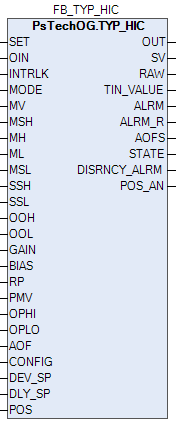
Функциональный блок TYP_HIC выполнен на основе базового функционального блока MLD_SW и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (MH, ML) для обработки тревог блока.
|
Функциональный блок TYP_HIC обеспечивает возможность ручной загрузки управляющей переменной в модуль аналогового вывода или последовательный канал связи.
Блок TYP_HIC выбирает управляющий выходной сигнал для передачи на аналоговый выходной модуль или последовательный канал связи, переключаясь между выходным сигналом, полученным от другого блока управления, и собственным выходным сигналом, сформированным вручную.
Список доступных режимов функционального блока TYP_HIC:
В ручном режиме (MAN) блок выдает на выход значение, установленное в результате работы и функции контроля в качестве управляющего выходного сигнала (CSV) для управления конечным элементом управления. В каскадном режиме (CAS) блок выполняет вычислительную обработку значения, поступающего на вход от другого функционального блока и выдает результат в виде выходной управляющей величины (MV).
Если ручной загрузчик имеет технологическую или защитную блокировку, то при ее активации он переходит в предопределенное состояние и меняет режим на MAN. Чтобы показать оператору, что он не может работать, блок будет переведен в положение TRK. Значение слежения будет установлено на предопределенное значение, которое может быть установлено на низкую, высокую шкалу или на требуемое значение в зависимости от действия блокировки.
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
В случае состояния данных PFAL выходного канала автоматически формируется сигнал тревоги OOP.
Для получения более подробной информации об отказе выхода ознакомьтесь с:
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP.
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока TYP_HIC:
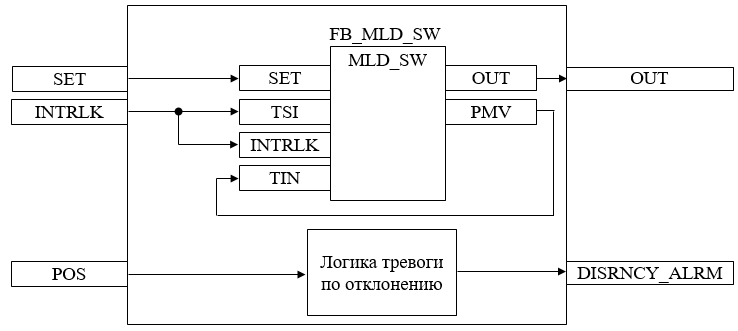
Состав элементов блока TYP_HIC:
Блок FB_MLD_SW базового типа MLD_SW используется для обработки окончательного значения выхода для клапана.
Подпрограмма логики тревоги по отклонению используется для генерирования сигнала отклонения между заданием положения на клапан и значением положения клапана.
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения блока TYP_HIC:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
SET
|
Вход задания
|
Запись
|
-
|
x
|
x
|
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
|
POS
|
Положение клапана
|
Запись
|
-
|
x
|
x
|
x: соединение разрешено
-: соединение запрещено