5.5.2.4.5.2.1. Алгоритм
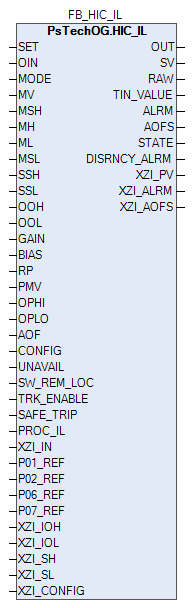
Технологический функциональный блок HIC_IL выполнен на основе базового функционального блока MLD_SW и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (MH, ML) для обработки тревог блока.
|
В данном разделе описывается функция программного модуля для команды аналогового выхода (регулятор с ручным управлением) для систем АСУТП. Этот программный модуль используется, когда аналоговый выход (4–20 мА) управляется оператором или алгоритмом.
Список доступных режимов функционального блока HIC_IL:
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока HIC_IL:
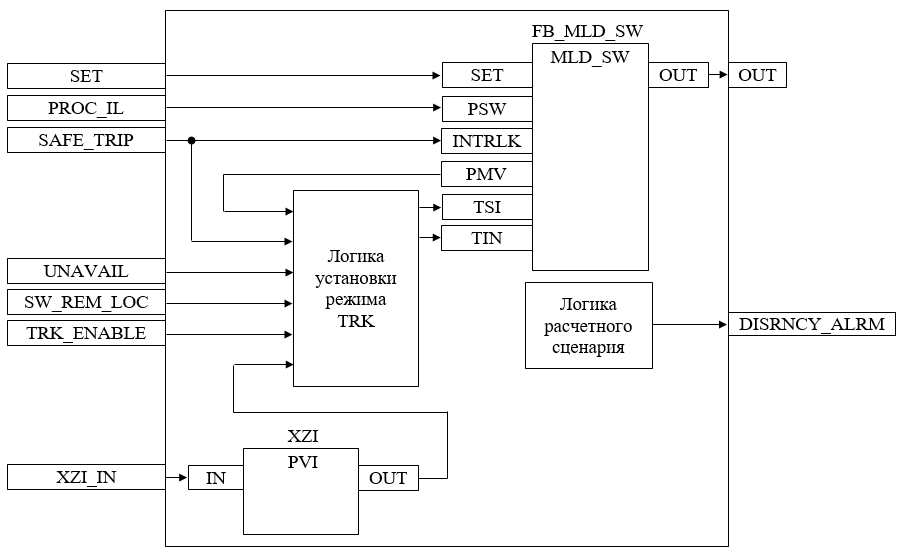
Состав элементов блока HIC_IL:
Блок FB_MLD_SW базового типа MLD_SW используется для обработки окончательного значения выхода для клапана или двигателя. Выход будет сравниваться со значением обратной связи для генерирования сигнала об отклонении. После срабатывания останова технологического процесса блок принудительно переключается на заданное значение.
Подпрограмма логики расчетного сценария используется для генерирования аварийного сигнала отклонения.
Подпрограмма логики установки режима TRK используется для формирования режима отслеживания и формирования значения входа отслеживания TIN блока FB_MLD_SW в зависимости от входного защитного сигнала (SAFE_TRIP).
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения блока HIC_IL:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
PROC_IL
|
Блокировка работы
|
Запись
|
x
|
x
| |
|
SAFE_TRIP
|
Защита
|
Запись
|
x
|
x
| |
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
|
ZXI_IN
|
Вход обратной связи положения
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Основные функции
Ниже приведены основные функции для типового элемента регулятора клапана с ручным управлением:
регулировка выхода
останов технологического процесса (инициируется, например, при соответствующем состоянии XV
ошибка аналогового выхода
представление в HMI
Регулировка выхода:
Для закрытых при отказе клапанов FC, -- 0% для закрытия (4 мА) 100% для открытия (20 мА)
Для открытых при отказе клапанов FO, -- 0% для закрытия (20 мА) 100% для открытия (4 мА)
Подробное описание
Для частоты вращения двигателя или анализаторов выходной диапазон будет в соответствии с диапазоном единиц измерения, заданным в базе данных SPI. (Например: 0–2000 об/мин и т.д.). В этом случае состояние герметичной отсечки отключено. Функция инвертирования выходного сигнала может выполняться как стандартная функция в выходных модулях.
Останов технологического процесса: в случае защитной блокировки (вход SAFE_TRIP = TRUE) блок перейдет в режим отслеживания MAN_TRK и его выход будет принудительно настроен на заданное состояние (на значение параметра PMV, установленное в окне параметров), при этом доступ оператора будет запрещен до отключения блокировки. При снятии сигнала защитной блокировки (вход SAFE_TRIP = FALSE) блок останется в ручном режиме MAN в состоянии ожидания команды от оператора на перевод блока в каскадный режим CAS.
Также переход в режим отслеживания (TRK) происходит по одному из условий:
- Переключатель "ДИСТ./МЕСТН." в положении "МЕСТН." (вход SW_REM_LOC = TRUE);
- Состояние "Недоступен" блока (вход UNAVAIL = TRUE);
Переход в режим отслеживания (TRK) не по причине защитной блокировки может быть заблокирован с помощью конфигурационного параметра TRK_ENABLE = FALSE.
Алгоритмом предусмотрена возможность «безударного» перехода при переключении дискретных состояний МЕСТНЫЙ/ДИСТАНЦИЯ. В режиме МЕСТНЫЙ при отсутствии защитной блокировки происходит отслеживание управляемой переменной MV по значению позиционной обратной связи XZI.
Ошибка выхода: В случае неисправности платы вывода генерируется ошибка выхода (аварийный сигнал OOP), а выход регулятора сохраняет последнее допустимое значение.
Для получения более подробной информации об отказе выхода ознакомьтесь с:
|
Линейно изменяющаяся функция: Функция линейного нарастания / убывания обеспечивает резкое изменение без перемещения клапана; степень линейного изменения может быть отрегулирована старшим оператором.
Сигнал об отклонении: Сигнал об отклонении генерируется, «если разница между окончательным значением выхода и значением позиционной обратной связи превышает заданное значение, а время задержки истекло».
Если регулятор клапана с ручным управлением управляется внешней логикой:
Режим будет принудительно переведен с КАСКАД на РУЧН в случае блокировки технологического процесса или защитной блокировки.
Выход будет принудительно настроен на заданные значения.