
5.5.2.4.12.3.1. Алгоритм
Технологический функциональный блок PID_RM выполнен на основе базового функционального блока INDST3.
В данном разделе описывается программная функция для модуля дистанционного мониторинга и ПИД-управления в подсистеме. Данный программный модуль будет использоваться для сбора результатов измерений и выполнять функцию непрерывного контроля через ПИД-алгоритм.
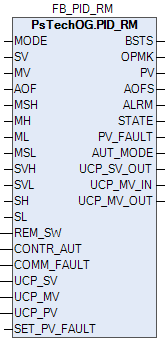
Список доступных режимов функционального блока PID_RM:
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока PID_RM:
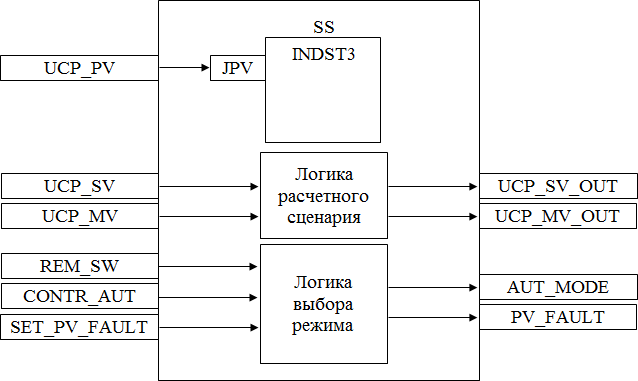
Состав элементов блока PID_RM:
Блок SS базового типа INDST3 используется в дистанционном ПИД-управлении для настройки и мониторинга значений (PV, SV и MV) подсистемы.
Подпрограмма логики расчетного сценария используется в дистанционном ПИД-управлении для получения и передачи значений SV и MV в подсистему.
Подпрограмма логики выбора режима используется в дистанционном ПИД-управлении для реализации логики переключения режимов подсистемы.
В таблице ниже перечислены методы доступа к входам/выходам и адресаты блока PID_RM:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
REM_SW
|
Переключатель "МЕСТН./ДИСТ."
|
Запись
|
x
|
-
| |
|
CONTR_
AUT |
Режим "АВТО" контроллера из подсистемы
|
Запись
|
Данные от коммуникационного порта/модуля
|
x
|
x
|
|
UCP_SV
|
Сигнал SV от подсистемы
|
Запись
|
Данные от коммуникационного порта/модуля
|
x
|
x
|
|
UCP_MV
|
Сигнал MV от подсистемы
|
Запись
|
Данные от коммуникационного порта/модуля
|
x
|
x
|
|
UCP_PV
|
Сигнал PV от подсистемы
|
Запись
|
Данные от коммуникационного порта/модуля
|
x
|
x
|
|
UCP_SV_OUT
|
Выходная уставка
|
Чтение
|
Данные для коммуникационного порта/модуля
|
x
|
x
|
|
UCP_MV_OUT
|
Выходная управляемая переменная
|
Чтение
|
Данные для коммуникационного порта/модуля
|
x
|
x
|
x: соединение разрешено
-: соединение запрещено
Основные функции
Ниже приведены основные функции для типового элемента ПИД:
функция контроля с использованием ПИД-алгоритма
автоматическая маскировка аварийного сигнала
представление в HMI
Подробное описание
Регулировка выхода:
Для закрытых при отказе клапанов FC, -- 0% для закрытия (4 мА) 100% для открытия (20 мА)
Для открытых при отказе клапанов FO, -- 0% для закрытия (20 мА) 100% для открытия (4 мА)
Ручной режим: ПИД-алгоритм отключается, и оператор может задать окончательное значение выхода MV. Уставка SV отслеживает значение измерения PV.
Автоматический режим: ПИД-алгоритм функционирует с уставкой оператора SV.
Контур регулирования дистанционного мониторинга / ПИД-управления в подсистеме: Данная функция может быть реализована через аппаратные выходы и последовательные коммуникационные сигналы, а расчет функций управления останется в подсистеме.
Возможные интерфейсы оператора перечислены ниже с учетом дистанционного / локального выбора:
Когда подсистема работает в режиме дистанционного управления, расчет ПИД-управления основан на выборе режима и уставке, взятой из АСУТП, сохраняется последнее допустимое значение после ошибки сигнала / связи. Сигнал выбора режима, уставка и выходной сигнал регулятора передаются от АСУТП в подсистему как сигналы SDO и SAO.
Когда подсистема работает в режиме локального управления, расчет ПИД-управления основан на выборе режима и уставке, взятой из подсистемы. Сигнал выбора режима, уставка и выходной сигнал регулятора передаются от АСУТП в подсистему как сигналы SDI и SAI для индикации.
Примечание: Когда вход (программный модуль аналогового входа), связанный с ПИД-регулятором, находится в состоянии ошибки (вход SET_PV_FAULT = TRUE), ПИД-регулятор принудительно переключается в режим РУЧН, а исполнение алгоритма управления отключается.