5.3.3.1.10. INTEGR | ИНТЕГРАТОР
Алгоритм позволяет:
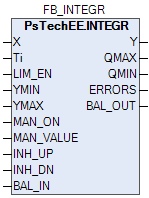
выполнять интегрирование с передаточной функцией W(p) = 1 / TI∙p;
останавливать интегрирование при наличии запретов;
выполнять пороговый контроль выходного сигнала;
выполнять ограничение выходного сигнала в заданном диапазоне;
устанавливать выходное значение внешней схемой;
выполнять каскадную балансировку источника сигнала.
Выходное значение интегратора вычисляется по формуле:
Y= (T0/Ti) ∙ (X_1 + X)/2 + Y_1,
где
X_1 – входное значение X от предыдущего цикла
Y_1 – выходное значение Y от предыдущего цикла
T0 – время цикла задачи ПЛК
|
Таблица состояний
Выходной сигнал Y формируется в соответствии с таблицей состояний:
|
MAN_ON
|
BAL_IN.CMD
|
INH_UP
|
INH_DN
|
BAL_OUT.CMD
|
Y
|
|
FALSE
|
TRACKING
|
*
|
*
|
TRACKING
|
BAL_IN.VALUE
|
|
FALSE
|
NO
|
FALSE
|
FALSE
|
NO
|
Y= Y_1 + (T0/Ti) ∙ (X_1 + X)/2
|
|
FALSE
|
NO
|
TRUE
|
FALSE
|
NO_UP
|
Y_1
|
|
FALSE
|
NO
|
FALSE
|
TRUE
|
NO_DN
|
Y_1
|
|
FALSE
|
NO_CHANGE
|
*
|
*
|
NO_CHANGE
|
Y_1
|
|
FALSE
|
NO_UP
|
*
|
TRUE
|
NO_CHANGE
|
Y_1
|
|
FALSE
|
NO_DN
|
TRUE
|
*
|
NO_CHANGE
|
Y_1
|
|
FALSE
|
NO_UP
|
*
|
FALSE
|
NO_UP
|
Y_1
|
|
FALSE
|
NO_DN
|
FALSE
|
*
|
NO_DN
|
Y_1
|
|
TRUE
|
*
|
*
|
*
|
TRACKING
|
MAN_VALUE
|
Как видно из таблицы, вход BAL_IN может запрещать увеличение и/или уменьшение выходного значения Y либо содержать значение с указанием отслеживать его на выходе Y.
Команда балансировки источнику X обобщает указания запрета направлений изменения X с входов INH_UP, INH_DN и BAL_IN. Если вход BAL_IN задает слежение или включен режим подмены MAN_ON = TRUE, команда задает слежение BAL_OUT.VALUE =0.
При значении параметра LIM_EN = TRUE выходной сигнал ограничивается в диапазоне YMIN <= Y <= YMAX:
|
Условие
|
Y
|
QMIN
|
QMAX
|
|
YMIN < Y < YMAX
|
Y
|
FALSE
|
FALSE
|
|
Y <= YMIN
|
YMIN
|
TRUE
|
FALSE
|
|
Y >= YMAX
|
YMAX
|
FALSE
|
TRUE
|