5.5.2.1.4.10. Компенсация выхода
Компенсация выхода представляет собой управляющее воздействие, состоящее в добавлении величины скомпенсированного входа/выхода VN, получаемой извне, к выходному сигналу расчета ПИД-управляющего воздействия.
Характеристики компенсации выхода
Выражение для вычисления компенсации выхода:
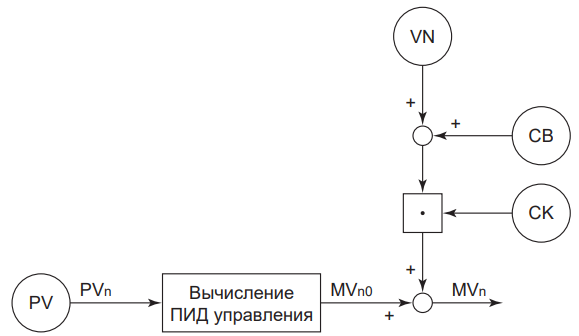
MVn = MVn0 + CK x (VN + CB);
где MVn – управляющий выход после компенсации выхода;
MVn0 – управляющий выход до компенсации выхода;
CK – коэффициент усиления компенсации входа/выхода;
VN – смещение для компенсации входа/выхода (внутреннее смещение);
CB – компенсационное значение входа/выхода (сигнал смещения).
|
Вызов вышеуказанной формулы в прикладном проекте осуществляется каждый цикл регулирования ПИД-регулятора и поэтому значение MV каждый такт увеличивается на величину CK x (VN + CB).
Значение VN подготавливается внешней логикой для каждого такта ПИД-регулятора (для каких то тактов обнуляется, для каких то устанавливается значение и т.д.), а не просто устанавливается константой, как простоe смещение BIAS.
Рисунок ниже иллюстрирует ход процесса компенсации выхода:
Пример использования компенсации выхода
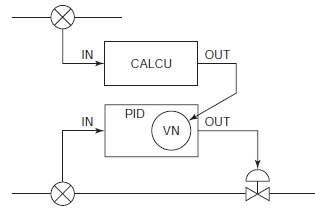
Компенсация выхода используется для управления с упреждением, когда к выходному управляющему сигналу добавляется упреждающий сигнал, либо для автономного управления, когда к выходному управляющему сигналу добавляется выходной сигнал из взаимосвязанного контура.
Рисунок ниже иллюстрирует пример управления с упреждением: