
5.5.2.1.5.12. Обработка выхода в блоках управления моторами
Ниже перечислены типы специальной обработки выходного сигнала в блоке управления двигателем:
Задание управляющего выхода (MV)
Преобразование выходного сигнала
Шаговый выход
Внешний/местный выход
Отслеживание ответного сигнала
Проверка блокировки
Отслеживание выхода
Задание управляющего выхода (MV)
Метод задания значения управляющего выхода (М\/) зависит от режима блока управления моторами.
При работе блока в ручном режиме (MAN) значение управляющего выхода (MV) задается следующим способом:
Значение управляющего выхода (MV) задается со станции оператора АРМ;
Для выхода в шаговом режиме значение управляющего выхода (MV) задается автоматически на основе значения задания (SV), задаваемого со станции оператора АРМ.
При работе блока в автоматическом (AUT) или каскадном (CAS) режимах в качестве значения управляющего выхода (MV) устанавливается значение задания в каскадном режиме (CSV), задаваемое другим функциональным блоком, например, блоком логического управления или вычислительным блоком.
При работе блока в режиме удаленного вывода (ROUT) в качестве значения управляющего выхода (MV) устанавливается значение внешнего управляющего выхода (RSV), задаваемое удаленной подсистемой. Если режимом блока не является режим удаленного вывода (ROUT), то выполняется процедура отслеживания, в ходе которой значение внешнего задания (RSV) отслеживает значение выхода (MV).
При работе блока в режиме отслеживания (TRK) значение управляющего выхода (MV) задается следующим образом в зависимости от настройки конфигурационного параметра CONFIG.CONTR_CALC.ANSW_TRACK в среде Astra.IDE:
Если задана функция отслеживания ответного сигнала (значение TRUE), то в качестве значения управляющего выхода (MV) задается значение входа ответного сигнала (PV).
Если функция отслеживания ответного сигнала не задана (значение FALSE) и если в качестве преобразования выходного сигнала (параметр CONFIG.OUTPUT.SIGN_CONVERS типа ENUM_OUT_CONVERS в среде Astra.IDE) заданы значения ST2 или ST3, то производится считывание состояний выходных блоков и результат обратного преобразования выходного сигнала устанавливается в качестве значения управляющего выхода (MV).
Преобразование выходного сигнала
Для блоков управления моторами предусмотрены следующие типы обработки выхода:
|
Задание преобразования выходного сигнала
|
Число контактов выхода
|
Задание направления выходного воздействия
|
|
2-позиционый выход состояния (ST2)
|
1
|
Да
|
|
З-позиционый выход состояния (ST3)
|
2
|
Да
|
|
2-позиционый импульсный выход (PL2)
|
2
|
Нет
|
|
З-позиционый импульсный выход (PL3)
|
3
|
Нет
|
Тип преобразования выходного сигнала задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.SIGN_CONVERS типа ENUM_OUT_CONVERS, для которого возможны следующие значения:
ST2. 2-позиционный выход состояния (только для MC_2(E));
ST3. 3-позиционный выход состояния (только для MC_3(E));
PL2. 2-позиционный импульсный выход (только для MC_2(E));
PL3. 3-позиционный импульсный выход (только для MC_3(E));
При выборе значения ST2 или ST3 возможно задание направления выходного воздействия в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.ACT_DIR типа ENUM_DIR, для которого возможны следующие значения:
DIRECT. Прямое действие;
REVERSE. Обратное действие;
INV_DIR_ACT. Прямое действие при обратном соединении (только для MC_2 и MC_3);
INV_REV_ACT. Прямое действие при обратном соединении (только для MC_2 и MC_3);
При выборе значения PL2 или PL3 возможно задание длительности импульса в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 2-позиционного выхода состояния и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT(1)
|
|
Прямое
|
2
|
TRUE
|
|
0
|
FALSE
| |
|
Обратное
|
0
|
TRUE
|
|
2
|
FALSE
|
Рисунок ниже иллюстрирует действие 2-позиционного выхода состояния:
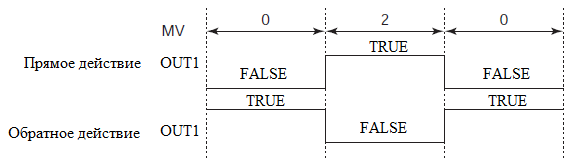
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 3-позиционного выхода состояния и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT1
|
Положение дискретного выхода
OUT2
|
|
Прямое
|
2
|
TRUE
|
FALSE
|
|
1
|
FALSE
|
FALSE
| |
|
0
|
FALSE
|
TRUE
| |
|
Обратное
|
2
|
FALSE
|
TRUE
|
|
1
|
TRUE
|
TRUE
| |
|
0
|
TRUE
|
FALSE
| |
|
Прямое действие при обратном соединении
|
2
|
FALSE
|
TRUE
|
|
1
|
FALSE
|
FALSE
| |
|
0
|
TRUE
|
FALSE
| |
|
Прямое действие при обратном соединении
|
2
|
TRUE
|
FALSE
|
|
1
|
TRUE
|
TRUE
| |
|
0
|
FALSE
|
TRUE
|
Рисунок ниже иллюстрирует действие 3-позиционного выхода состояния:
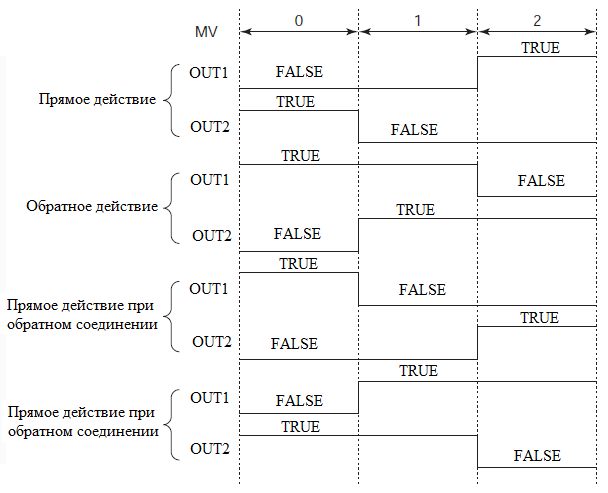
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 2-позиционного импульсного выхода и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного выхода
OUT1
|
Положение дискретного выхода
OUT2
|
|
-
|
2
|
Импульс
|
FALSE
|
|
0
|
FALSE
|
Импульс
|
Рисунок ниже иллюстрирует действие 2-позиционного импульсного выхода:
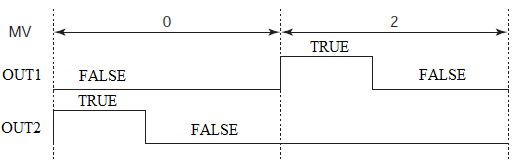
Для импульсного выходного сигнала время пребывания в состоянии TRUE задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Таблица ниже иллюстрирует соответствие между положение TRUE/FALSE 3-позиционного импульсного выхода и значением управляющего выхода (MV):
|
Направление выходного воздействия
|
MV
|
Положение дискретного
выхода OUT1
|
Положение дискретного
выхода OUT2
|
Положение дискретного
выхода OUT3
|
|
-
|
2
|
Импульс
|
FALSE
|
FALSE
|
|
1
|
FALSE
|
FALSE
|
Импульс
| |
|
0
|
FALSE
|
Импульс
|
FALSE
|
Рисунок ниже иллюстрирует действие 3-позиционного импульсного выхода:
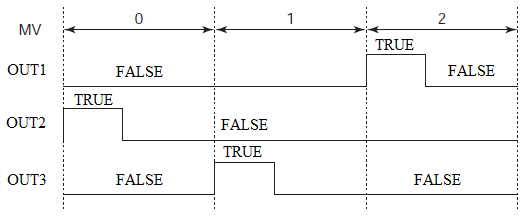
Для импульсного выходного сигнала время пребывания в состоянии TRUE задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.OUTPUT.PULSE_WIDTH.
Шаговый выход
Функция шагового выхода обеспечивает запуск и остановку двигателя на определенное время в соответствии с действиями оператора в ручном режиме в ходе выполнения рабочих операций и текущего контроля.
Шаговый выход инициируется при изменении значения задания (SV) для шагового выхода. Управляемая работа исполнительного элемента продолжается в течение времени (Тout), пропорционального изменению значения SV (ΔSV), начиная от 0 %, 50 % или 100 %.
По истечении времени Тout значение задания для шагового выхода соответствует значению управляющего выхода (MV) до момента его изменения. Работа функции шагового выхода возможна только в ручном режиме (MAN).
Когда функция шагового выхода не работает, значение задания для шагового выхода соответствует значению управляющего выхода (MV).
Таблица ниже иллюстрирует соответствие между значением управляющего выхода (MV) и значением задания для шагового выхода (SV):
|
MV
|
0
|
1
|
2
|
|
SV
|
0 %
|
50 %
|
100 %
|
Значение Тout рассчитывается по формуле:
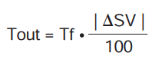 , ,где TOUT – время действия толчкового выхода, с;
Tf – продолжительность полного цикла работы шагового выхода, с;
ΔSV – изменение SV (%) = значение SV после изменения — значение SV до изменения.
|
Установка "Длительность полного хода в шаговом режиме" соответствует времени работы исполнительного элемента при изменении значения задания (SV) для шагового выхода на 100 % и задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INCH_FULL_STR.
Действие шагового выхода для преобразования выходного сигнала типа "2-позиционный выход состояния" (ST2) состоит в реверсировании состояния дискретного выхода в течении времени Tout.
Рисунок ниже иллюстрирует действие 2-позиционного шагового выхода состояния (длительность полного хода = 100 сек.):
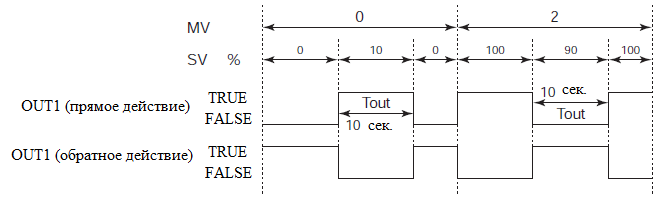
Действие шагового выхода для преобразования выходного сигнала типа "3-позиционный выход состояния" (ST3) состоит в следующем:
При MV = 2 выход OUT1 реверсируется в течении времени Tout;
При MV = 0 выход OUT2 реверсируется в течении времени Tout;
При MV = 1 реверсируется выход OUT1 в течении времени Tout, если изменение значения задания (ΔSV) для шагового выхода положительно или реверсируется выход OUT2 в течении времени Tout, если изменение значения задания (ΔSV) для шагового выхода отрицательно.
Действие шагового выхода для преобразования выходного сигнала типа "2-позиционный импульсный выход" (PL2) состоит в следующем:
При MV = 2 на выходе OUT2 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT1;
При MV = 1 на выходе OUT1 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT2.
Действие шагового выхода для преобразования выходного сигнала типа "3-позиционный импульсный выход" (PL3) состоит в следующем:
При MV = 2 на выходе OUT3 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT1;
При MV = 0 на выходе OUT3 формируется импульс и по истечении времени Tout формируется импульс на выходе OUT2;
При MV = 1 формируется импульс на выходе OUT1 в случае положительного изменения значения задания (ΔSV) или на выходе OUT2 в случае отрицательного изменения значения задания (ΔSV) и по истечении времени Tout формируется импульс на выходе OUT3.
Внешний/местный вход
Функция внешнего/местного входа состоит в считывании состояния локальных кнопочных переключателей, установленных вблизи оборудования, например, клапанов или насосов, и в предотвращении изменения выходных сигналов от блоков управления моторами,
так как при работе системы в местном режиме местные операции обладают более высоким приоритетом.
Внешний/местный входной сигнал поступает через вход TSI блока управления моторами. Помимо дискретного входа, в качестве входа сигнала может также использоваться вход TSW_REF. Сигнал внешнего/местного входа сохраняется на переключателе отслеживания (TSW).
Таблица ниже иллюстрирует соответствие между внешним/местным входным сигналом и переключателем отслеживания:
|
Входной сигнал
|
Внешний/местный
|
TSW
|
Режим
|
|
FALSE
|
Внешний
|
FALSE
|
Любой кроме TRK
|
|
TRUE
|
Местный
|
TRUE
|
TRK
|
Когда вход TSI не подключен, данные могут передаваться непосредственно на переключатель отслеживания (TSW) со входа TSW_REF. При TSW = TRUE блок устанавливается в местный ручной режим (TRK). Когда TSW становится равным FALSE, блок возвращается в нормальный режим (MAN, AUT, CAS или ROUT).
Отслеживание ответного сигнала
Функция отслеживания ответного сигнала заключается в принудительном приравнивании значения управляющего выхода (MV) к значению входа ответного сигнала (PV), когда блок находится в местном ручном режиме (TRK) или если переключатель команды байпаса (BPSW) находится в положении 4 (O_S).
Функция отслеживания ответного сигнала задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_ALC.ANSW_TRACK.
Проверка блокировки
Функция проверки блокировки используется для перевода блока управления мотором в состояние блокировки в соответствии с входным сигналом блокировки операций, подаваемым на вход IL блока управления мотором.
Функция проверки блокировки не работает в следующих условиях:
Состояние симуляции (SIM)
Выдана команда байпаса функции проверки блокировки (BPSW = 2 (ITRLK) или 3 (ANSW_INTRLK)
|
Направление входного сигнала блокировки указывает на способ активации состояния блокировки: по состоянию TRUE или
FALSE входного сигнала блокировки операций. Данный способ задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INTRLK_DIR, для которого возможны следующие значения:
DIRECT. Предусматривает активацию блокировки по состоянию TRUE сигнала блокировки.
REVERSE. Предусматривает активацию блокировки по состоянию FALSE сигнала блокировки.
В состоянии блокировки может выполняться предварительно заданное выходное действие.
Заданное выходное воздействие задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.INTRLK_OUT, для которого возможны следующие значения:
CLOSE. Закрыть.
OPEN. Открыть.
При активации состояния блокировки отслеживается изменение выходного сигнала, и после выполнения данного изменения в результате выходного воздействия предварительно заданного состояния блокировки срабатывает сигнализация блокировки (INT). При
отключении блокировки происходит одновременное отключение сигнализации блокировки.
Если блок управления мотором находится в состоянии блокировки, то возможно сохранение предыдущего значения управляющего выхода (MV). Эта функция может быть задана в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.HOLD_OUT. Если выбрано значение TRUE, то блок обеспечивает сохранение предыдущего выхода в случае блокировки. Если выбрано значение FALSE, то блок обеспечивает изменение выхода в соответствии с выходным сигналом, обеспечивающим безопасное состояние и заданным в качестве параметра CONFIG.CONTR_CALC.INTRLK_OUT.
Отслеживание выхода
Отслеживание выхода представляет собой обработку выхода блоков МС-2Е и МС-ЗЕ.
Отслеживание выхода приводит значение управляющего выхода (MV) в соответствие со значением сигнала слежения от выходных блоков.
Отслеживание выхода запускается при переходе блока в режим IMAN.