5.3.3.1.17. RLIM_SEL | ПЕРЕКЛЮЧАТЕЛЬ
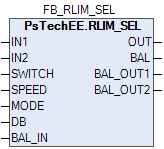
Алгоритм позволяет:
выполнять передачу на выход одного из двух входных сигналов;
выполнять постоянное или временное (только на период переключения) ограничение скорости изменения выходного сигнала;
выполнять балансировку источников входных сигналов для обеспечения безударной работы каскадных схем.
Качество выходного сигнала OUT определяется качеством входного сигнала IN:
OUT.QUALITY = IN.QUALITY
|
Балансировка
В алгоритме реализована каскадная балансировка источника сигнала.
Если команда на входе BAL_IN установлена в TRACKING, то команды выходов BAL_OUT1 и BAL_OUT2 повторяют команду на входе BAL_IN, а значения слежения повторяют значение выходного сигнала OUT.
Если переключатель SWITCH = FALSE и команда на входе BAL_IN не установлена в TRACKING, то команда балансировки BAL_OUT1 повторяет команду на входе BAL_IN. При этом команда BAL_OUT2 устанавливается в TRACKING, а значение слежения повторяет значение выходного сигнала OUT.
Если переключатель SWITCH = TRUE и команда на входе BAL_IN не установлена в TRACKING, то команда балансировки BAL_OUT2 повторяет команду на входе BAL_IN. При этом команда BAL_OUT1 устанавливается в TRACKING, а значение слежения повторяет значение выходного сигнала OUT.
Условия формирования выхода BALANCE:
|
Условие формирования
|
Значение
|
Описание
|
|
IN.VALUE = OUT.VALUE
|
NO
|
Нет
|
|
IN.VALUE > OUT.VALUE
|
UP
|
Больше
|
|
IN.VALUE < OUT.VALUE
|
DN
|
Меньше
|
Ограничение скорости действует всегда, если выбран постоянный режим ограничения скорости (MODE = FALSE), либо включается при переключении входа SWITCH, если выбран временный режим ограничения скорости (MODE = TRUE). Временное ограничение скорости действует пока разница значений входного и выходного сигналов не попадет в зону нечувствительности DB. Если ограничение скорости не действует, то значение входного сигнала транслируется на выход.
Условие отключения временного ограничения скорости:
ABS (IN.VALUE - OUT.VALUE) <= DB
|
Скорость выходного сигнала ограничивается заданным значением SPEED с учетом направления:
Если IN.VALUE >= OUT_1.VALUE, то
OUT.VALUE = SPEED∙CYCLETIME + OUT_1.VALUE,
где
OUT_1.VALUE – выходное значение OUT от предыдущего цикла;
CYCLETIME – время цикла задачи ПЛК.
|
Если IN.VALUE < OUT_1.VALUE, то
OUT.VALUE = - SPEED∙CYCLETIME + OUT_1.VALUE,
где
OUT_1.VALUE – выходное значение OUT от предыдущего цикла;
CYCLETIME – время цикла задачи ПЛК.
|
Таблица состояний
Выходные сигналы формируются в соответствии с таблицей состояний:
|
SWITCH
|
BAL_IN.CMD
|
BAL_OUT1.CMD
|
BAL_OUT1.VALUE
|
|
FALSE
|
TRACKING
|
TRACKING
|
OUT.VALUE
|
|
FALSE
|
<>TRACKING
|
BAL_IN.CMD
|
BAL_IN.VALUE
|
|
TRUE
|
TRACKING
|
TRACKING
|
OUT.VALUE
|
|
TRUE
|
<>TRACKING
|
TRACKING
|
OUT.VALUE
|
|
BAL_OUT2.CMD
|
BAL_OUT2.VALUE
|
OUT
|
|
TRACKING
|
OUT.VALUE
|
IN1
|
|
TRACKING
|
OUT.VALUE
|
IN1
|
|
TRACKING
|
OUT.VALUE
|
IN2
|
|
BAL_IN.CMD
|
BAL_IN.VALUE
|
IN2
|