
5.5.2.2.4.2.3. TM | ИЗМЕРЕНИЕ ВРЕМЕНИ В СЕКУНДАХ ИЛИ МИНУТАХ
Блок таймера (ТМ) используется для измерения времени в секундах или минутах.
Блок таймера (TM) — это функциональный блок, измеряющий время в секундах или минутах. В дополнение к основной функции измерения пройденного времени блок включает в себя функцию предустановленного таймера, которая уведомляет об истечении заданного времени, функцию, которая выполняет периодическое действие, и функцию управления выходом блока.
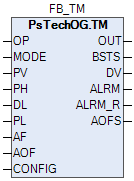
На рисунке ниже представлена функциональная блок-схема блока таймера (TM).
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов блока таймера (TM):
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Список доступных тревог функционального блока TM:
Нормальное состояние (NR)
Список доступных режимов функционального блока TM:
Список доступных состояний функционального блока TM:
Состояние приостановки таймера (PAUS)
Состояние работы таймера и 0 < DV ≤ DL (PALM)
Состояние работы таймера и DV = 0 (CTUP)
Состояние работы таймера после команды запуска (RUN)
Состояние остановленного таймера после команды останова (STOP)
Выбор единиц отсчета времени осуществляется в среде Astra.IDE с помощью конфигурационного параметра CONFIG.BASIC.TM_PROPERTY, который может принимать следующие значения:
SEC. Выбор секунд в качестве единиц отсчета.
MINUTE. Выбор минут в качестве единиц отсчета.
Команды управления для блока таймера (TM)
Команда управления подается на вход управляющей команды (OP) из других функциональных блоков или из прикладной логики и может иметь следующие значения:
NO. Отсутствие команды.
STOP. Команда останова.
START. Команда пуска.
RSTR. Команда перезапуска.
WAIT. Команда паузы.
Работа блока таймера
Когда блок таймера получает команду, состояние блока изменяется в соответствии с данной командой. Для блока таймера существует четыре основных типа действий: запуск, останов, пауза и перезапуск.
Когда блок таймера (TM) получает команду запуска, он начинает отсчет после сброса (PV=0) пройденного времени таймера (PV). Статус блока таймера (TM) изменяется на «подсчет» (RUN). DV указывает оставшееся время таймера (DV=PH-PV).
Когда блок таймера (TM) получает команду останова, он останавливает действие счета, удерживая пройденное время таймера (PV). Состояние блока таймера (TM) изменяется на остановленное состояние (STOP).
Когда блок таймера (TM) получает команду паузы, действие счета останавливается. Во время паузы блок таймера (TM) удерживает пройденное время таймера (PV) или другие данные. Состояние блока таймера (TM) изменяется на состояние паузы (PAUS).
Когда блок таймера (TM) в состоянии паузы получает команду перезапуска, действие подсчета продолжается. Блок таймера (TM) выходит из состояния паузы (PAUS) и возвращается к предыдущему состоянию блока, которое удерживалось. Состояние паузы (PAUS) сбрасывается при получении команды перезапуска.
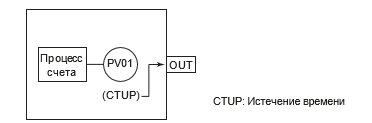
Предустановленный таймер
Предустановленная функция таймера уведомляет об истечении заданного времени. Содержание уведомления включает в себя состояние истечения времени (CTUP) на основе заданного значения времени (PH) и состояние перед сигналом тревоги (PALM), которое дает предварительные уведомления до достижения заданного времени.
В зависимости от оставшегося времени таймера (DV=PH-PV) блок может переходить в следующие состояния из состояния подсчета (RUN):
0 < DV ≤ DL. Предтревожное состояние (PALM).
DV = 0. Состояние истечения времени (CTUP).
Если значение уставки предварительного сигнала тревоги (DL) равно 0, то состояние предварительного сигнала тревоги (PALM) не возникает.
Периодическое выполнение
Когда блок таймера достигает состояния истечения времени (CTUP), блок таймера может быть перезапущен для повторного счета. Это периодическое действие можно задать в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.PERIOD_ACT, который может принимать следующие значения:
FALSE (периодическое выполнение отключено). При данной настройке когда состояние CTUP становится истинным, обновление пройденного времени останавливается. Таким образом сохраняется статус PV = PH и DV = 0. Когда состояние истечения времени (CTUP) истинно, состояние блока и пройденное время таймера (PV) будут удерживаться, даже если заданное заданное значение времени (PH) будет изменено. Для отмены состояния CTUP должна быть подана команда останова или запуска.
TRUE (периодическое выполнение включено). При данной настройке когда состояние CTUP становится истинным, блок автоматически сбрасывает значение пройденного времени (PV) и переходит в состотяние счета (RUN).
Логическое значение выхода
Логическое значение выхода блока таймера (TM) становится TRUE, когда блок находится в состоянии истечения времени (CTUP), и становится FALSE, когда блок переходит в другое состояние.