5.5.2.4.13.1.1. Алгоритм
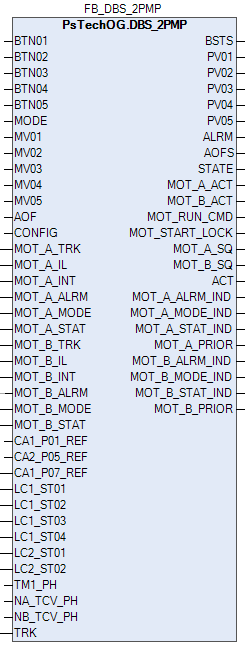
Технологический функциональный блок DBS_2PMP выполнен на основе базового функционального блока PBS5C.
Данный типовой элемент описывает управление насосной станции, состоящей из 2, 3 или 4 насосов / насосных установок.
Насос рассматривается, как
РАБОЧИЙ, когда он находится в рабочем состоянии, если требуется только один насос.
РЕЗЕРВНЫЙ, когда он находится в рабочем состоянии, если требуется дополнительный насос.
ЗАПАСНОЙ, если он запускается в работу при отказе рабочего или резервного насоса.
Этот типовой элемент может применяться со стандартными программными модулями более низкого уровня, такими как:
насосная установка, управляющая насосом и впускными и выпускными клапанами;
электродвигатель (когда нет впускных и выпускных клапанов);
стандартными программными модулями более высокого уровня.
Блок DBS_2PMP реализует работу АВР насосной станции, состоящей из двух насосов («рабочий / запасной»).
Список доступных режимов функционального блока DBS_2PMP:
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока DBS_2PMP:
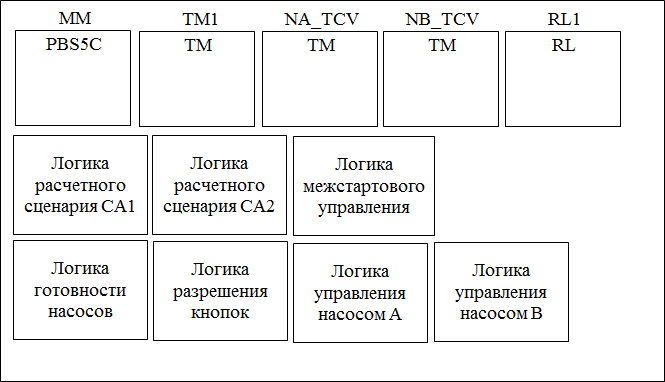
Состав элементов блока:
Блок MM базового типа PBS5C используется для реализации переключения режимов РУЧН/КАСКАД DBS и подачи команд ПУСК /ОСТАНОВ DBS.
Подпрограмма логики расчетного сценария CA1 используется для обработки значения требуемого количества насосов.
Подпрограмма логики расчетного сценария CA2 используется для обработки значения схемы АВР насосов.
Подпрограмма логики готовности насосов используется для формирования признаков готовности насосов.
Подпрограмма логики разрешения кнопок используется для управления разрешением/запретом работы кнопок лицевой панели блока MM.
Подпрограмма логики межстартового управления используется для реализации межстартового алгоритма.
Подпрограмма логики управления насосом A представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса A.
Подпрограмма логики управления насосом B представляет собой пошаговую программу, реализующую алгоритм формирования команд пуска/останова насоса B.
Основные функции
Ниже приведены основные функции для типового элемента DBS_2PMP:
управление модулем РАБОЧ / РЕЗЕРВ / ЗАПАСН;
интерфейс стандартных модулей более низкого уровня (ПУСК/ОСТАНОВ, состояние, неисправности, режим Ручн/Авт только для стандартных модулей электродвигателя и т.д.);
интерфейс стандартных модулей более высокого уровня (число требуемых насосов, режим автономный / каскадный);
интерфейс команд операторы (команда пуска / останова, число требуемых насосов, приоритетность насосов).
Подробное описание
Интерфейс Насосная установка / электродвигатель: На экране HMI оператор может выбрать интерфейс DBS либо с насосной установкой, либо напрямую с электродвигателем, используя селекторный переключатель насосная установка / электродвигатель.
Интерфейс насосной установки с DBS: Если переключатель режимов РУЧН/АВТО/КАСКАД переведен в режим КАСКАД, то команда пуска / останова последовательности насосной установки управляется модулем DBS. Когда насосная установка работает в режиме КАСКАД, у оператора нет доступа к команде пуска / останова насосной установки.
Интерфейс электродвигателя с DBS: Если переключатель режимов АВТО / РУЧН переведен в режим АВТО, а переключатель НАСОСНАЯ УСТАНОВКА / ЭЛЕКТРОДВИГАТЕЛЬ переведен в положение ЭЛЕКТРОДВИГАТЕЛЬ, то команда пуска / останова электродвигателя управляется DBS.
DBS в каскадном / автономном (АВТО/РУЧН): Если DBS выполняет операции управления более высокого уровня, последовательность оснащена функцией переключения режимов DBS АВТО/РУЧН. В режиме РУЧН последовательность и требуемое количество насосов выбирается оператором. В режиме АВТО работой DBS и выбором требуемого количества насосов управляет логика более высокого уровня.
Модуль управления более высокого уровня основан на пороговых значениях программного модуля цифрового входа, программного модуля простого регулятора (ПИД-регулятора), расчетах или логике, описанной в соответствующем функциональном анализе. Требуемое количество насосов вычисляется из пороговых значений аналогового входа.
Требуемое количество насосов: Требуемое количество насосов вычисляется автоматическим регулятором более высокого уровня, если DBS работает в режиме АВТО. Требуемое количество насосов может быть равно числу насосных установок. Когда DBS работает в режиме РУЧН, требуемое количество насосов настраивается оператором.
Выбор насосов по приоритету: Оператор может изменить приоритет насосов, задав порядок приоритетности в HMI. Также оператор может выбрать способ ввода приоритета насосов: символами или цифрами, используя селекторный переключатель. Логика выбора приоритета зависит от количества насосов конкретного программного модуля DBS. Ошибочные данные, введенные оператором, исключаются логикой выбора приоритета. Благодаря этому исключаются символы, не относящиеся к конкретному типовому элементу DBS.
Состояние активное / бездействие: Если команда последовательности пуска DBS активна, на экране HMI состояние будет отображаться как «активное», в противном случае — как «состояние бездействия».
Внутренний таймер пуска: Время задержки для запуска следующего насоса (2-й, 3-й и 4-й насос). Единый таймер используется в Обязанность- Резервное копирование-резервный насос последовательность запуска.
Таймер перекрытия: Задержка времени до останова насоса после запуска другого насоса при переключении насосов. Индивидуальный таймер используется для каждого насоса.
Изменение требуемого количества насосов:
Требуемое количество насосов изменяется с 2 на 1, когда насос с приоритетом 2 останавливается.
Требуемое количество насосов изменяется на 0, DBS передает команду ОСТАНОВ, все работающие насосы останавливаются.
Требуемое количество насосов может изменяться до 0 либо логикой более высокого уровня, когда DBS находится в режиме АВТО, или когда DBS находится в режиме ручного управления.
Изменение приоритета: При изменении приоритета во время работы DBS в зависимости от настройки приоритета и количества работающих насосов:
рабочий и резервный насосы переключаются;
запасной насос останавливается.
Насосная установка / электродвигатель в состоянии неготовности: Насос с приоритетом 2 запускается, если насос с приоритетом 1 находится в состоянии неготовности.
Команда пуска / останова DBS: Команда пуска / останова доступна для оператора, только если DBS находится в режиме РУЧН. Команда пуска / останова DBS принудительно настраивается на ОСТАНОВ в случае отключения всех имеющихся насосов и недоступна для оператора до нормализации состояния отключения по крайней мере одного насоса.
Если DBS работает в режиме АВТО, команды ПУСК / ОСТАНОВ управляются логикой более высокого уровня.
Команда ПУСК выдается, когда требуемое количество насосов не равно нулю.
Команда ОСТАНОВ выдается, когда требуемое количество насосов равно нулю.