
5.5.2.3.2.1.1. Алгоритм
Функциональный блок TYP_PID выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Компенсация входа представляет собой добавление компенсационного значения VN_REF, получаемого извне, к входному сигналу расчета ПИД-управляющего воздействия
| |
|
Компенсация выхода представляет добавление величины компенсационного значения VN_REF, получаемой извне, к выходному сигналу расчета ПИД-управляющего воздействия.
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
|
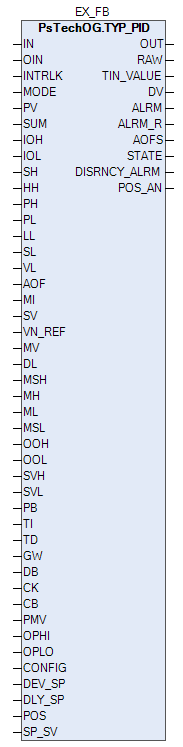
Функциональный блок стандартного ПИД-регулятора имеет на входе переменную процесса (PV), а на выходе - управляющую переменную (MV). Значение переменной процесса (от 4 до 20 мА) поступает с поля через модуль аналогового ввода. Управляющее значение является выходом (4...20 мА) через модуль аналогового вывода на поле (регулирующий клапан).
Список доступных режимов функционального блока TYP_PID:
Отслеживание измерений задается только для режима MAN, чтобы обеспечить бесперебойный переход при смене режима с MAN на AUT.
Если активна технологическая или защитная блокировка, то регулятор принудительно переводится в заданное состояние и меняет режим на MAN. Чтобы показать оператору, что он не может работать, блок будет установлен в режим слежения (TRK). Значение MV установится на заранее заданное значение, которое может быть установлено на низкую, высокую шкалу или на требуемое значение в зависимости от действия блокировки.
Задание уставки регулирования
Если блок находится в ручном режиме при запрете слежения в ручном режиме (конфигурационный параметр СONFIG.BASIC.MEAS_TRACK_MAN = FALSE) или если блок находится в автоматическом режиме и отключен вход предустановленной уставки SP_SV (статус входа SP_SV – O/S), то уставка регулирования может быть задана вручную оператором из HMI (в окнах "Рабочее окно" или "Настройки"). Если вход предустановленной уставки SP_SV подключен (статус входа SP_SV не равен O/S), то значение уставки SV будет определяться предустановленным значением на входе SP_SV.
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
В случае состояния данных "Вход открыт (IOP)" или BAD или "Выход открыт (OOP)" на блоке ПИД формируется сигнал тревоги IOP или OOP.
Для получения более подробной информации об отказе входа ознакомьтесь с:
Для получения более подробной информации об отказе выхода ознакомьтесь с:
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP.
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока TYP_PID:
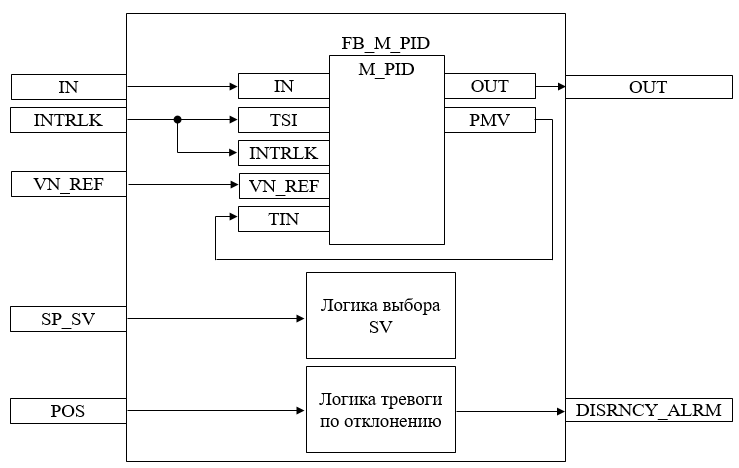
Состав элементов блока TYP_PID:
Блок FB_M_PID базового типа M_PID обеспечивает функцию пропорционально-интегрально-дифференциального регулирования с учетом отклонения технологической переменной (PV) от значения уставки (SV).
Подпрограмма логики выбора SV используется для реализации логики выбора задания уставки регулирования для блока YYY (от АРМ оператора или от входа предустановленной уставки SP_SV).
Подпрограмма логики тревоги по отклонению используется для генерирования сигнала отклонения между заданием положения на клапан и значением положения клапана.
В таблице ниже перечислены методы доступа к входам/выходам и адресаты блока TYP_PID:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
|
SP_SV
|
Вход предустановленной уставки
|
Запись
|
-
|
x
|
x
|
|
POS
|
Положение клапана
|
Запись
|
-
|
x
|
x
|
x: соединение разрешено
-: соединение запрещено