
5.5.2.2.5.3.1.1. Алгоритм

ПИД-регулятор (M_PID) обеспечивает выполнение наиболее общих управляющих функций с использованием пропорционального, интегрального и дифференциального регулирования по отклонению переменной процесса (PV) от значения задания (SV).
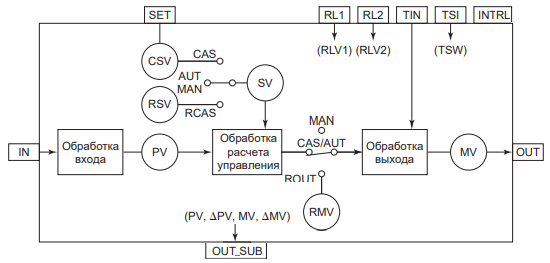
На рисунке ниже показана функциональная блок-схема блока ПИД-регулятора (M_PID):
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов ПИД-регулятора (M_PID):
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
SET
|
Вход задания
|
Запись
|
-
|
x
|
x
|
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
|
OUT_SUB
|
Дополнительный выход
|
Чтение
|
x
|
x
| |
|
RL1
|
Вход сигнала сброса 1
|
Запись
|
x
|
x
| |
|
RL2
|
Вход сигнала сброса 2
|
Запись
|
x
|
x
| |
|
BIN
|
Вход компенсации
|
Запись
|
x
|
x
| |
|
TIN
|
Вход сигнала слежения
|
Запись
|
x
|
x
| |
|
TSI
|
Вход переключателя слежения
|
Запись
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Назначение ПИД-регулятора (M_PID)
Блок M_PID выполняет обработку входа, вычислений, выхода и аварийной сигнализации.
Список доступных типов обработки входа функционального блока M_PID:
Нет преобразования
Аналоговый вход
Преобразование путем вычисления квадратного корня
Преобразование входа последовательности импульсов
Вход подсистемы
Предельное значение PV
Список доступных типов обработки выхода функционального блока M_PID:
Вспомогательный выход PV
Вспомогательный выход ∆PV
Вспомогательный выход MV
Вспомогательный выход ∆MV
Нет преобразования
Аналоговый выход
ШИМ
Выход подсистемы
Список доступных тревог функционального блока M_PID:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения 2-го верхнего предела (HH)
Сигнализация достижения 2-го нижнего предела (LL)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Скоростная сигнализация + (VEL+)
Скоростная сигнализация - (VEL-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
Список доступных режимов функционального блока M_PID:
Для получения более подробной информации об обработке вxода ознакомьтесь с:
Для получения более подробной информации об обработке выxода ознакомьтесь с:
Для получения более подробной информации об обработке аварийной сигнализации ознакомьтесь с:
Для получения более подробной информации по заданию уставок сигнализации ознакомьтесь с:
Для получения более подробной информации по режиму запрета обслуживания ознакомьтесь с:
|
Обработка управляющих вычислений
В таблице ниже показаны функции обработки управляющих вычислений блока ПИД-регулятора (M_PID):
|
Обработка управляющих вычислений
|
Описание
|
|
ПИД-управление
|
Производятся вычисления управляющего выхода (MV) и изменения управляющего выхода (ΔMV) по алгоритмам ПИД-управления.
|
|
Игнорирование управляющих действий (байпас)
|
Выполняются действия ПИД-регулирования посредством игнорирования действий дифференциального регулирования (D), пропорционального регулирования (Р), а также одновременно и пропорционального, и дифференциального регулирования (P+D).
|
|
Нелинейное усиление
|
Изменяется пропорциональное усиление в соответствии со степенью отклонения так, что соотношение между отклонением и изменением управляющего выхода (ΔMV) становится нелинейным.
|
|
Нелинейное усиление с интервальным действием
|
Уменьшается пропорциональное усиление средних управляющих воздействий в том случае, когда отклонение находится внутри интервала (GW).
|
|
Нелинейное усиление с действием квадратичного отклонения
|
Производится изменение пропорционального усиления в соответствии со степенью отклонения, когда отклонение находится внутри диапазона (GW).
|
|
Действие управляющего выхода
|
Осуществляется преобразование изменения управляющего выхода (ΔMV) в течение каждого периода управления в действительный управляющий выход (MV). Управляющие выходные действия, реализуемые этим функциональным блоком, относятся к «позиционному» и «скоростному» типам.
|
|
Направление действия управляющего выхода
|
Выполняется переключение действия управляющего выхода (прямое или обратное действие) в соответствии с ростом или уменьшением отклонения
|
|
Функция ограничения сброса
|
Выполняются корректирующие вычисления с использованием значений, считанных с адресатов соединения входов RL1 и RL2 в процессе расчета ПИД-управления. Данная функция предотвращает аггравацию ситуации сброса.
|
|
Действие в зоне нечувствительности
|
Приращение управляющего выхода (ΔMV) настраивается на 0, если отклонение не выходит из диапазона зоны нечувствительности, чтобы предотвратить изменение управляющего выхода (MV).
|
|
Компенсация входа-выхода
|
Прибавляется поправка входа/выхода (VN), поступившая извне, к входному сигналу или сигналу управляющего выхода ПИД-вычислений, когда контроллер работает автоматически.
|
|
Компенсация входа
|
Прибавляется поправка входа-выхода (VN), поступившая извне, к входному сигналу вычислений ПИД-управления.
|
|
Компенсация выхода
|
Прибавляется поправка входа-выхода (VN), поступившая извне, к выходному сигналу вычислений ПИД-управления.
|
|
Отслеживание переменной процесса
|
Осуществляется согласование задания (SV) с переменной процесса (PV).
|
|
Ограничитель задания
|
Выполняется ограничение задания (SV) в рамках пределов (SVH, SVL).
|
|
Уравнивание заданий
|
Осуществляется согласование двух из трех заданий (SV, CSV, RSV) с третьим.
|
|
Безударное переключение
|
Выполняется переключение управляющего выхода (MV), не вызывая его резкого изменения вследствие изменения режима блока или переключения управляющего выхода (MV) в последующем блоке каскада.
|
|
Ручная инициализация
|
Изменяется режим блока на IMAN, чтобы временно приостановить автоматическое управление. Данное действие реализуется при удовлетворении условия ручной инициализации.
|
|
Фиксация управления
|
Временно приостанавливается автоматическое управление при сохранении текущего режима блока. Во время фиксации управления действие выхода выполняется нормально.
|
|
Переход на ручной аварийный режим
|
Изменяется режим блока на MAN, чтобы остановить автоматическое управление. Данное действие реализуется при удовлетворении условия перехода на ручной аварийный режим.
|
|
Переход на автоматический аварийный режим
|
Изменяется режим блока на AUT, когда функциональный блок работает в режиме CAS или PRD, так что автоматическое управление продолжается в соответствии с уставками и заданиями оператора. Данное действие выполняется при удовлетворении условия перехода на автоматический аварийный режим.
|
|
Неисправность удаленной подсистемы
|
Временно приостанавливается автоматическое управление, и происходит переключение в резервный режим при обнаружении ошибки в удаленной подсистеме в то время, как функциональный блок работает в режиме RCAS или ROUT. Данное действие реализуется, когда удовлетворяется условие сбоя в работе удаленной подсистемы.
|
|
Блокировка изменения режима блока
|
Прекращается автоматическая работа автоматически работающих в настоящее время функциональных блоков, одновременно не позволяя неработающим блокам переходить на режим автоматического управления.
|
|
Действие режима PRD
|
Генерируется на выходе задание каскадного управления (CSV) после преобразования его в значение управляющего выхода (MV), когда режим блока изменяется на PRD.
|
Для получения более подробной информации о функциях обработки управляющих вычислений, применяемых в блоке ПИД-регулятора, ознакомьтесь с:
|
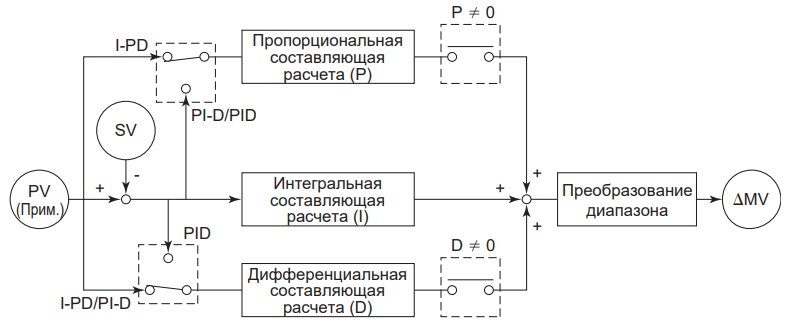
Алгоритм ПИД-управления
Расчет ПИД-управления представляет собой основу обработки ПИД-управляющих воздействий, выполняющую вычисление изменения управляющего выхода (ΔMV), используя алгоритмы ПИД-управления. ПИД управление является наиболее широко распространенным, т.к. сочетает в себе три типа действий: пропорциональное, интегральное и дифференциальное.
На рисунке ниже приведена блок-схема расчета ПИД-управления:
Выражение для расчета ПИД-управления, используемое в системах регуляторного управления (аналоговых системах управления):
 где MV(t) – управляющий выход;
E(t) = PV(t) – SV(t) – отклонение;
PV(t) – переменная процесса;
SV(t) – значение задания;
PB – диапазон пропорциональности, %;
TI – время интегрирования;
TD – время дифференцирования.
|
Если использовать значение выборки в каждом интервале периода управления для вышеприведенного выражения, дифференциальное уравнение для расчета ПИД-управления принимает вид:
 где ΔMVn – приращение управляющего воздействия;
En = PVn – SVn – отклонение;
PVn – переменная процесса;
SVn – значение задания;
PB – диапазон пропорциональности, %;
ΔEn = En – En-1 – приращение отклонения;
TI – время интегрирования;
TD – время дифференцирования;
ΔT – период управления.
Индексы "n" и "n-1" означают номер выборки в ходе периода управления.
|
Вышеприведенное дифференциальное уравнение вычисляет изменение управляющего воздействия (приращение). Новое значение выхода получается путем прибавления текущего приращения управляющего воздействия (ΔMVn) к предыдущему значению управляющего выхода (ΔMVn-1).
Типы расчета ПИД-управления
ПИД-регулятор использует следующие пять алгоритмов ПИД-управления для выполнения расчета ПИД-управления:
Базовое ПИД-управление (PID).
ПИД-управление, пропорциональное PV и по производной PV (I-PD).
ПИД-управление по производной PV (PI-D).
Автоматическое определение.
Автоматическое определение 2.
При расчете ПИД-управления входные параметры зависят от алгоритма ПИД-управления. В таблице ниже перечислены алгоритмы расчета ПИД-управления и входные параметры:
|
Алгоритм ПИД-управления
|
Входные переменные полинома
| ||
|
Пропорциональная составляющая
|
Дифференциальная составляющая
|
Интегральная
составляющая
| |
|
PID
|
En
|
En
|
En
|
|
I-PD
|
PV
|
PV
|
En
|
|
PI-D
|
En
|
PV
|
En
|
|
Автоматическое определение
|
Аналогично I-PD в режиме AUT
Аналогично PI-D в режиме CAS или RCAS
| ||
|
Автоматическое определение 2
|
Аналогично I-PD в режиме CAS или RCAS
Аналогично PI-D в режиме AUT
| ||
При работе ПИД-регулятора в режиме внешнего каскада RCAS алгоритмы ПИД-управления Автоматическое определение и Автоматическое определение 2 работают следующим образом:
Автоматическое определение: аналогично действиям в каскадном режиме CAS режиме.
Автоматическое определение 2: аналогично действиям в автоматическом режиме AUT.
Базовое ПИД-управление (PID)
Базовое ПИД-управление предполагает выполнение управляющих действий: пропорциональных, интегральных и дифференциальных, отслеживающих изменения значения задания. Данный алгоритм используется, когда константа времени процесса обработки велика, а управление предполагает немедленную реакцию на изменение значения задания.
Расчетное выражение базового ПИД-управления:
где ΔMVn – приращение управляющего воздействия;
En = PVn – SVn – отклонение;
PVn – переменная процесса;
SVn – значение задания;
ΔEn = En – En-1 – приращение отклонения;
ΔT – период управления;
Kp – пропорциональное усиление;
PB – коэффициент пропорциональности, %;
TI – время интегрирования;
TD – время дифференцирования;
Ks – коэффициент преобразования шкалы;
SH – верхний предел шкалы PV;
SL – нижний предел шкалы PV;
MSH – верхний предел шкалы MV;
MSL – нижний предел шкалы MV.
Переменная процесса PV и значение задания SV, используемые в расчете, задаются в физических единицах. Приращение управляющего воздействия DMV, получаемое в физических единицах, преобразуется с использованием коэффициента преобразования шкалы Ks.
|
ПИД-управление, пропорциональное PV и по производной PV (I-PD)
Данный тип управления предполагает выполнение только интегральных управляющих действий. Алгоритм обеспечивает устойчивое управление даже при резком изменении значения задания SV, при его установке путем ввода численного значения. Одновременно данный алгоритм обеспечивает адекватную реакцию на характерные изменения управляемого процесса, колебания нагрузки и возмущения с использованием пропорционального, дифференциального и интегрального управляющих действий соответственно.
Расчетное выражение для пропорционального и дифференциального алгоритма ПИД-управления (I-PD):
 где ΔMVn – приращение управляющего воздействия;
Kp – пропорциональное усиление;
Ks – коэффициент преобразования шкалы;
En = PVn – SVn – отклонение;
PVn – переменная процесса;
SVn – значение задания;
ΔPVn = PVn – PVn-1 – приращение переменной процесса;
ΔEn = En – En-1 – приращение отклонения;
TI – время интегрирования;
TD – время дифференцирования;
ΔT – период управления.
Индексы "n" и "n-1" означают номер выборки в ходе периода управления.
|
ПИД-управление по производной PV (PI-D)
Дифференциальный алгоритм ПИД-управления предполагает выполнение только пропорциональных и интегральных управляющих действий при изменении значения задания (без действия производной). Данный алгоритм используется, когда необходимо лучшее отслеживание изменений значения задания, например, при наличии вторичного блока управления в каскадном контуре управления.
Расчетное выражение дифференциального алгоритма ПИД-управления:
 где ΔMVn – приращение управляющего воздействия;
Kp – пропорциональное усиление;
Ks – коэффициент преобразования шкалы;
En = PVn – SVn – отклонение;
PVn – переменная процесса;
SVn – значение задания;
ΔPVn = PVn – PVn-1 – приращение переменной процесса;
TI – время интегрирования;
TD – время дифференцирования;
ΔT – период управления.
Индексы "n" и "n-1" означают номер выборки в ходе периода управления.
|
Автоматическое определение
При работе ПИД-регулятора в каскадном (CAS) или внешнем каскадном (RCAS) режиме для выполнения расчетов используется алгоритм ПИД-управления по производной PV (PI-D), что обеспечивает лучшее отслеживание изменения значения задания.
При работе блока в автоматическом режиме (AUT) для выполнения расчетов используется пропорциональный и дифференциальный алгоритм ПИД-управления (I-PD), что обеспечивает устойчивое управление даже в случае резкого изменения значения задания, обусловленного вводом численного значения.
Автоматическое определение 2
При работе ПИД-регулятора в каскадном режиме (CAS) для выполнения расчетов используется алгоритм ПИД-управления по производной PV (PI-D). При работе блока во внешнем каскадном (RCAS) или автоматическом (AUT) режиме для выполнения расчетов используется пропорциональный и дифференциальный алгоритм ПИД-управления (I-PD).
В каскадном режиме (CAS) автоматическое определение 2 предполагает возможность отслеживания изменения значения задания (CSV). Во внешнем каскадном режиме (RCAS) данный алгоритм предотвращает резкое изменение выходного значения, обусловленное резким изменением внешнего значения задания (RSV).
Игнорирование действия управления (байпас)
ПИД-регулятор может выполнять следующие действия управления, игнорируя пропорциональное и/или дифференциальное действие:
|
Игнорируемые управляющие действия
|
Управляющие действия после байпаса
|
Уставка установочного параметра
|
|
Дифференциальное D
|
Пропорциональное Р + интегральное I
|
P
|
|
Пропорциональное Р, Дифференциальное D
|
Интегральное I
|
P = 0
|
Для задания игнорирования действия управления задайте уставку "0" для параметров P или D, как показано в таблице выше. Для пропорционального усиления (Kp) предусмотрено фиксированное значение "1", когда требуется только интегральное действие.