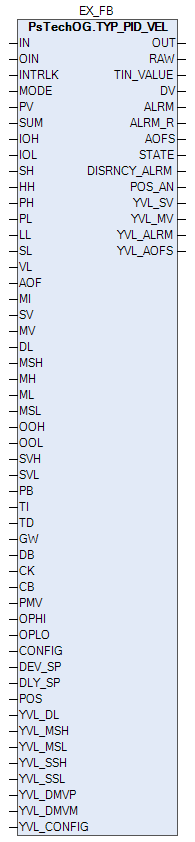
Функциональный блок TYP_PID_VEL выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
|
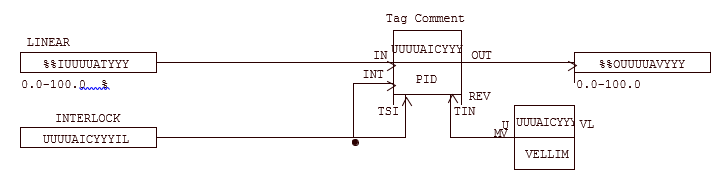
Функциональный блок стандартного ПИД-регулятора имеет на входе переменную процесса (PV), а на выходе - управляющую переменную (MV). Значение переменной процесса (от 4 до 20 мА) поступает с поля через модуль аналогового ввода. Управляющее значение является выходом (4...20 мА) через модуль аналогового вывода на поле (регулирующий клапан).
Список доступных режимов функционального блока TYP_PID_VEL:
Отслеживание измерений задается только для режима MAN, чтобы обеспечить бесперебойный переход при смене режима с MAN на AUT или CAS.
Если активна технологическая или защитная блокировка, то регулятор принудительно переводится в заданное состояние и меняет режим на MAN. Чтобы показать оператору, что он не может работать, блок будет установлен в режим слежения (TRK). Значение слежения/MV установится на заранее заданное значение, которое может быть установлено на низкую, высокую шкалу или на требуемое значение в зависимости от действия блокировки.
Данный функциональный блок отличается от стандартного наличием функции линейного изменения выхода блока. Для реализации данной функции испольузется стандартный блок VELLIM (ограничитель скорости).
Инициализация
По умолчанию при холодном пуске ПИД-регулятор находится в режиме MAN с выходом 0%.
Функция сигнализации
В случае состояния данных "Вход открыт (IOP)" или "BAD" или "Выход открыт (OOP)" на блоке ПИД формируется сигнал тревоги "IOP" или "OOP". Для условий "Вход открыт (IOP)" и "Выход открыт (OOP)" режим работы регулятора автоматически переключается в режим MAN. После восстановления аварийного сигнала OOP выход ПИД-регулятора устанавливается в безопасное для клапана значение (0% или 100%).
Для получения более подробной информации об отказе входа ознакомьтесь с:
Для получения более подробной информации об отказе выхода ознакомьтесь с:
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP.
Чертеж управления