
5.3.3.1.16. RLIM | ДЕМПФЕР
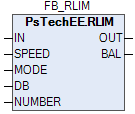
Алгоритм позволяет:
выполнять постоянное ограничение скорости выходного сигнала;
выполнять временное ограничение скорости изменения аналогового сигнала с момента изменения входа NUMBER и до момента выравнивания сигналов на входе и выходе;
формировать признаки направления балансировки.
Ограничение скорости действует всегда, если выбран постоянный режим ограничения скорости (MODE = FALSE), либо включается при изменении числа NUMBER, если выбран временный режим ограничения скорости (MODE = TRUE). Временное ограничение скорости действует пока разница значений входного и выходного сигналов не попадет в зону нечувствительности DB. Если ограничение скорости не действует, то значение входного сигнала транслируется на выход.
Условие отключения временного ограничения скорости:
ABS (IN.VALUE - OUT.VALUE) <= DB
|
Скорость выходного сигнала ограничивается заданным значением SPEED с учетом направления:
|
Условие
|
OUT.VALUE
|
|
IN.VALUE >= OUT_1.VALUE
|
OUT.VALUE = SPEED∙CYCLETIME + OUT_1.VALUE
|
|
IN.VALUE < OUT_1.VALUE
|
OUT.VALUE = - SPEED∙CYCLETIME + OUT_1.VALUE
|
где
OUT_1.VALUE – выходное значение OUT от предыдущего цикла;
CYCLETIME – время цикла задачи ПЛК.
Качество выходного сигнала OUT определяется качеством входного сигнала IN:
OUT.QUALITY = IN.QUALITY
|
Условия формирования выхода BALANCE:
|
Условие формирования
|
Значение
|
Описание
|
|
IN.VALUE = OUT.VALUE
|
NO
|
Нет
|
|
IN.VALUE > OUT.VALUE
|
UP
|
Больше
|
|
IN.VALUE < OUT.VALUE
|
DN
|
Меньше
|