5.5.2.2.5.2.1. SPLIT | БЛОК РАЗДЕЛЕНИЯ СИГНАЛОВ УПРАВЛЕНИЯ
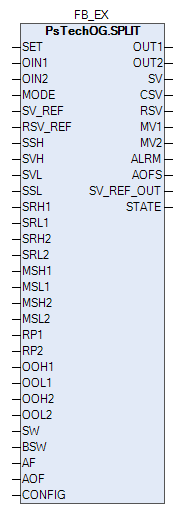
Блок разделения сигналов управления (SPLIT) может разделять сигналы управляющего выхода первичного контура управления на два адресата выхода через переключатель распределения сигналов. Этот блок может использоваться в контурах, в которых сигнал первичного контура распределяется на несколько вторичных контуров управления с различными диапазонами работы.
Блок разделения сигналов управления (SPLIT) может использоваться для нескольких вторичных контуров управления с различными диапазонами работы.
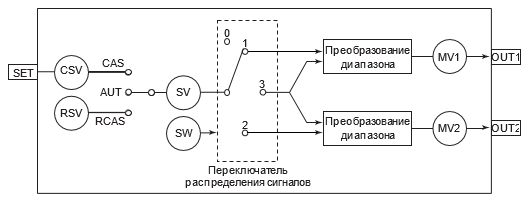
Рисунок ниже показывает функциональную блок-схему блока разделения сигналов управления (SPLIT):
Задание данных нельзя выполнить для управляющих выходов (МV1, MV2) блока разделения сигналов управления (SPLIT).
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов блока разделения сигналов управления (SPLIT):
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
SET
|
Вход уставки
|
Запись
|
-
|
-
|
x
|
|
OUT1
|
Выход 1
|
Чтение
|
-
|
x
| |
|
OUT2
|
Выход 2
|
Чтение
|
-
|
x
| |
x: соединение разрешено
-: соединение запрещено
Назначение блока разделения сигналов управления (SPLIT)
Блок SPLIT выполняет обработку вычислений, выхода и аварийной сигнализации.
Список доступных типов обработки выхода функционального блока SPLIT:
Нет преобразования
Аналоговый выход
Список доступных тревог функционального блока SPLIT:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Сигнализация нарушения соединения (CNF)
Список доступных режимов функционального блока SPLIT:
Для получения более подробной информации об обработке выxода ознакомьтесь с:
Для получения более подробной информации об обработке аварийной сигнализации ознакомьтесь с:
|
Обработка управляющих вычислений
В таблице ниже показаны функции обработки управляющих вычислений блока разделения сигналов управления (SPLIT):
|
Обработка управляющих вычислений
|
Описание
|
|
Распределение сигнала с переключением адресатов выхода
|
Генерируются два значения управляющего выхода (МV1, МV2) на основе переменной процесса (РV).
|
|
Действие управляющего выхода
|
Осуществляется преобразование изменения управляющего выхода (ΔMV) в течение каждого периода управления в действительный управляющий выход (MV). Управляющие выходные действия, реализуемые этим функциональным блоком, относятся только к «позиционному» типу.
|
|
Направление действия выхода MV
|
Выполняет переключение направления увеличения/уменьшения значения управляющего выхода (MVn) в соответствии с увеличением/уменьшением величины задания (SV). Направление действия управляющего выхода данного функционального блока задается для каждого адресата выхода.
|
|
Ограничитель задания
|
Выполняется ограничение задания (SV) в рамках пределов (SVH, SVL).
|
|
Уравнивание заданий
|
Осуществляется согласование двух из трех заданий (SV, CSV, RSV) с третьим.
|
|
Безударное переключение
|
Выполняется переключение управляющего выхода (MV), не вызывая его резкого изменения вследствие изменения режима блока или переключения управляющего выхода (MV) в нижестоящем блоке каскада.
|
|
Балансировка при безударном переключении
|
Предотвращается резкое изменение управляющего выхода (MV) настройкой составляющей балансировки в выражении для вычисления управляющего выхода.
|
|
Ручная инициализация
|
Изменяется режим блока на IMAN, чтобы временно приостановить автоматическое управление. Данное действие реализуется при удовлетворении условия ручной инициализации.
|
|
Переход на автоматический аварийный режим
|
Изменяется режим блока на AUT, когда функциональный блок работает в режиме CAS, так что автоматическое управление продолжается в соответствии с уставками от оператора. Данное действие выполняется при удовлетворении условия перехода на автоматический аварийный режим.
|
|
Неисправность удаленной подсистемы
|
Временно приостанавливается автоматическое управление, и происходит переключение в резервный режим при обнаружении ошибки в удаленной подсистеме в то время, как функциональный блок работает в режиме RCAS или ROUT. Данное действие реализуется, когда удовлетворяется условие сбоя в работе удаленной подсистемы.
|
Обработка выхода, характерная для блока разделения сигналов управления (SPLIT)
При обработке выхода в блоке SPLIT используется специальная фиксация выхода («output clamp»).
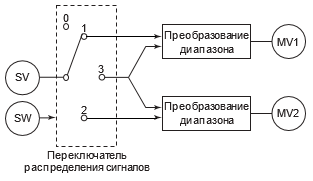
Распределение сигналов с переключением адресатов выхода
Рисунок ниже показывает действие по разделению сигналов управления:
Диапазон значений задания (SV)
Используйте входы SVH и SVL блока для установки диапазона значений задания (SV).
Расчет управляющего выхода
Блок разделения сигналов управления (SPLIT) генерирует два управляющих выхода (MV1, MV2), вычисляемых из переменной процесса (SV). Формулы для расчета даны в последующих параграфах.
С помощью входов настройки диапазона действия выходов функционального блока пользователь может выполнить предварительную установку диапазона действия по заданию SV для двух управляющих выходов (SRH1, SRL1, SRH2, SRL2), причем заданные значения должны быть в пределах диапазона SV. На рисунке ниже дан пример диапазонов действия:
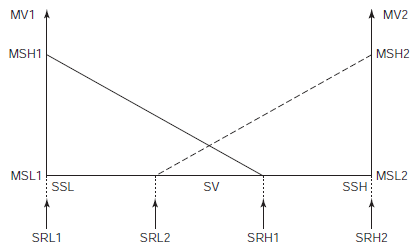
Значения управляющих выходов (MV1, MV2) могут быть получены из следующих выражений:
Если действие выхода (MV) имеет прямое направление («direct»):
 Если действие выхода (MV) имеет обратное направление («reverse»):
 где MVi – управляющий выход (i = 1 или 2);
CALCi - расчетное значение управляющего выхода;
BLi – уравновешивающая составляющая;
SV – значение задания;
MSHi - верхний предел шкалы МVi;
MSLi - нижний предел шкалы МVi;
SRHi - верхний предел диапазона действия MVi;
SRLi - нижний предел диапазона действия MVi;
|
Переключатель распределения сигнала
Обычные действия блока разделения сигналов управления (SPLIT) включают вычисление управляющего выхода для каждой выходной точки по значению задания и распределение сигналов по обоим адресатам выхода. Однако распределение сигналов может ограничиваться одной заданной точкой выхода действием переключателя распределения сигнала (SW).
Ниже дана таблица, устанавливающая соответствие позиций и действий переключателя распределения сигнала:
|
Положение переключателя (SW)
|
Действие
|
|
0
|
Прекращается распределение сигнала.
|
|
1
|
Распределяются сигналы только для выхода MV1.
|
|
2
|
Распределяются сигналы только для выхода MV2.
|
|
3
|
Распределяются сигналы для обоих выходов.
|
Действие управляющего выхода
Действие управляющего выхода преобразует приращения управляющего выхода (ΔMV) в течение каждого периода управления в действительный управляющий выход (MV). Действие, которое преобразует приращение управляющего выхода в действительный
управляющий выход (MV), называется «действием управляющего выхода». Для блока разделения сигналов управления (SPLIT) доступен только «позиционный тип» действия управляющего выхода. Результат расчета управляющего выхода, соответствующий позиции переключателя распределения сигнала, выводится как управляющий выход (MV).
Направление управляющего действия
Функция направления управляющего действия переключает направление возрастания/убывания значения управляющего выхода (MV) в соответствии с увеличением или уменьшением задания (SV).
Если управляющий выход (MV) изменяется в том же направлении, что и задание (SV), то управляющее действие называется прямым («direct»), тогда как, если MV изменяется в направлении, противоположном направлению изменения SV, то такое действие называется
обратным («reverse»).
Для задания направления управляющего действия каждого из выходов используются конфигурационные параметры CONFIG.OUTPUT.MV1_OUT_DIR (направление выхода MV1) и CONFIG.OUTPUT.MV2_OUT_DIR (направление выхода MV2) типа ENUM_CONTR_ACT.
Ограничитель задания
Функция ограничителя задания ограничивает значение задания (SV) внутри диапазона между верхним (SVH) и нижним (SVL) пределами и рассматривает действительным только задание (SV) из этого диапазона.
Для получения более подробной информации об ограничителе задания, ознакомьтесь с:
|
Уравнивание заданий
Функция уравнивания заданий устанавливает одно значение для трех типов задания (SV, CSV, RSV).
Действие уравнивания заданий зависит от режима функционального блока:
Действие в автоматическом (AUT) режиме. Вынуждает значение задания при каскадном управлении (CSV) и внешнее задание (RSV)
согласовываться со значением задания (SV).
Действие в каскадном режиме (САS). Вынуждает значение задания (SV) и внешнее задание (RSV) согласовываться со значением задания при каскадном управлении (CSV).
Действие в режиме внешнего каскада (RCAS). Вынуждает значение задания (SV) и значение задания при каскадном управлении (CSV)
согласовываться со значением внешнего задания (RSV).
Безударный переход
Безударный переход переключает режим функционального блока или управляющее воздействие нижестоящего блока в контуре каскада, не вызывая резкого изменения управляющего выхода (MV) (т.е. безударное изменение). Действие безударного перехода зависит от действия управляющего выхода и режима блока.
Безударный переход, осуществляемый блоком разделения сигналов управления (SPLIT), относится к типу действий “Балансировка”. Функция балансировки регулирует уравновешивающую составляющую, когда входная величина (SV) обратной связи резко изменяется во время работы в автоматическом (AUT) или каскадном (CAS) режиме для того, чтобы предотвратить резкое изменение управляющего выхода (MV). Использование балансировки позволяет осуществлять безударный переход режима блока с автоматического (AUT) на каскадный (CAS).
Балансировка предотвращает резкое изменение управляющего выхода при изменении условий работы установки. Следующее выражение используется для расчета BLi:
где BLi – уравновешивающая составляющая (i = 1 или 2);
MVRBi – величина управляющего выхода;
CALCi - расчетное значение управляющего выхода.
|
Условия выполнения балансировки (переключение рабочих условий):
Распределение сигнала началось после изменения уставки переключателя распределения сигнала (SW)
Завершение режима ручной инициализации во время распределения сигнала
При выполнении действия балансировки BLi линейно приближается к 0 на установленное значение (постоянная ускорения RP) в процессе каждого последующего периода сканирования пока окончательно не достигнет 0. Настройка значений постоянной ускорения осуществляется с помощью входов RP1 (для MV1) и RP2 (для MV2) блока.
Ручная инициализация
Ручная инициализация представляет собой функцию обработки ошибки, временно приостанавливающую управляющее воздействие и меняющую режим блока на ручную инициализацию (IMAN). Данная функция работает при создании условия ручной инициализации.
Характеристики ручной инициализации
Функция ручной инициализации временно приостанавливает выполнение управляющего действия и действия управляющего выхода в ходе работы в автоматическом режиме (AUT) или в другом режиме автоматической обработки при создании условия ручной инициализации, и меняет режим функционального блока на режим ручной инициализации (IMAN).
При устранении условия ручной инициализации блок возвращается в исходный режим. Однако, если в режиме ручной инициализации (IMAN) выполняется операция смены режима, после устранения условия ручной инициализации блок переходит в режим, заданный данной операцией.
Условие ручной инициализации
Условие ручной инициализации - это условие перехода режима блока, временно приостанавливающее управляющее действие и действие управляющего выхода путем изменения режима блока на ручную инициализацию (IMAN). Режим ручной инициализации
(IMAN) активизируется только тогда, когда выполняется условие ручной инициализации.
Следующий пример показывает, когда выполняется или перестает действовать условие ручной инициализации:
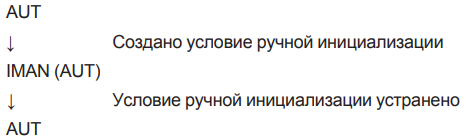
Условие ручной инициализации для блока разделения сигналов управления (SPLIT) выполняется в следующих случаях:
Когда SW = 1 и условие ручной инициализации выполняется в адресате соединения выхода OUT1.
Когда SW = 2 и условие ручной инициализации выполняется в адресате соединения выхода OUT2.
Когда SW = З и условие ручной инициализации выполняется в адресатах соединения выходов OUT1 и OUT2.
Условие ручной инициализации выполняется в следующих ситуациях:
Состояние данных от адресата управляющего выхода (MV) является условным CND (каскадный контур разомкнут).
Состояние данных от адресата управляющего выхода (MV) – ошибка связи (NCOM) или сбой выхода (PTPF).
Адресатом управляющего выхода (MV) является канал физического модуля вывода сигналов и происходит отказ данного канала.
Аварийный переход на автоматический режим
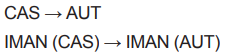
Аварийный переход на автоматический режим — это функция обработки ошибки, которая переключает режим блока с каскадного (CAS) на автоматический (AUT), когда выполняется условие аварийного перехода на автоматический режим, и переключает управления на режим, использующий значения, заданные оператором.
Характеристики аварийного перехода на автоматический режим
Изменяется режим блока с каскадного (CAS) на автоматический (AUT) для продолжения управления с использованием значений, установленных оператором.
Как только выполнилось условие аварийного перехода на автоматический режим, режим блока останется автоматическим (AUT), даже когда перестанет действовать это условие.
Условие аварийного перехода на автоматический режим
Условие аварийного перехода на автоматический режим используется для изменения режима функционального блока с каскадного (CAS) на автоматический (AUT) так, что управление может продолжаться с использованием значений, установленных оператором. Когда выполняется это условие, это свидетельствует, что было обнаружено аномальное изменение задания каскадного управления (CSV), вызванное некоторыми причинами.
Следующий пример показывает, когда выполняется и перестает действовать условие аварийного перехода на автоматический режим:
Для задания использования или неиспользования функции аварийного перехода на автоматический режим используется конфигурационный параметр CONFIG.CONTR_CALC.AUT_FALLBACK блока в среде разработки Astra.IDE.
Условие аварийного перехода на автоматический режим выполняется, когда конфигурационный параметр CONFIG.CONTR_CALC.AUT_FALLBACK = TRUE, а состояние данных задания каскадного управления (SV) стало плохим (BAD).
Неисправность удаленной подсистемы
В случае неисправности удаленной подсистемы функциональный блок временно приостанавливает работу в режиме удаленного каскада (RCAS) и переходит в резервный режим.
Характеристики неисправности удаленной подсистемы
В режиме удаленного каскада (RCAS) функциональный блок получает значение уставки (SV) от удаленной подсистемы.
При неисправности удаленной подсистемы блок переходит в предварительно установленный резервный режим (AUT или CAS), что свидетельствует о возникновении неисправности в удаленной подсистеме. При возвращении удаленной подсистемы в нормальное состояние блок возвращается в исходный режим.
Следующие действия осуществляются, когда действует условие неисправности удаленной подсистемы, и посылается команда смены режима блока c AUT или CAS на RCAS:
1. При посылке команды перехода блока из режима AUT или CAS в режим RCAS во время неисправности удаленной подсистемы (BSW = TRUE), функциональный блок переходит в резервный режим не сразу, а только после переключения в переходное состояние. Переходное состояние - это смешанный режим блока, сочетающий в себе режим блока до команды перехода (AUT, CAS) и удаленный режим (RCAS).
2. В ходе первого цикла сканирования ПЛК после выполнения команды изменения режима блока функциональный блок проверяет состояние удаленной подсистемы и переходит в смешанный режим, сочетающий в себе резервный режим (AUT, CAS) и удаленный режим (RCAS).
3. Если во время работы функционального блока в резервном режиме удаленная подсистема возвращается в нормальное состояние, то режим блока меняется на удаленный каскад (RCAS).
Условие неисправности удаленной подсистемы
Условие неисправности удаленной подсистемы - это условие переключения блока в переходное состояние, во время которого работа в режиме удаленного каскада (RCAS) приостанавливается, и происходит переход в резервный режим.
Для задания режима удаленного каскада (RCAS) в функциональном блоке предусмотрен резервный переключатель (BSW). Состояние данного переключателя указывает на неисправность удаленной подсистемы или ее возвращение в нормальное состояние.
Переключение в резервный режим не работает в случае текущего режима блока, отличного от режима удаленного каскада (RCAS).
Резервный переключатель (BSW) может принимать следующие значения:
BSW = TRUE указывает на неисправность удаленной подсистемы;
BSW = FALSE указывает на восстановление удаленной подсистемы.
Резервный режим задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.COMP_BCKP_MODE установкой значений AUT или CAS.
Фиксация выхода
Фиксация выхода представляет собой функцию, которая ограничивает управляющий выход (MV) таким образом, что он не может или превысить, или стать меньше своего текущего значения. Состояние, в котором управляющий выход (MV) подвергается такому ограничению, называется фиксацией выхода.
В блоке SPLIT, если значение выхода в каждом его адресате имеет такое ограничение, состояние фиксации выхода указывается посредством состояния данных MVn «CLP+» (фиксация по верхнему пределу) или «CLP-» (фиксация по нижнему пределу).
Состояние фиксации задания каскада (SV) принимает следующие значения:
Если SW = 0. Отсутствует состояние фиксации.
Если SW = 1. Если действие выхода MV1 является прямым, то состояние фиксации задания соответствует состоянию фиксации MV1. При обратном действии выхода, если MV1 имеет состояние CLP+, то состояние фиксации задания — CLP-, и если MV1 имеет состояние CLP-, то состояние фиксации задания принимает значение CLP+.
Если SW=2. Если действие выхода MV2 является прямым, то состояние фиксации задания соответствует состоянию фиксации MV2. При обратном действии выхода, если MV2 имеет состояние CLP+, то состояние фиксации задания — CLP-, и если MV2 имеет состояние CLP-, то состояние фиксации задания принимает значение CLP+.
Если SW = 3. Если действие выхода является прямым, и оба выхода MV1 и MV2 имеют состояние CLP+, или если действие выхода является обратным, и оба выхода MV1, МV2 имеют состояние CLP-, то состояние фиксации задания принимает значение CLP+. Если действие выхода является прямым, и оба выхода MV1 и MV2 имеют состояние CLP-, или если действие выхода является обратным, и оба выхода MV1, MV2 имеют состояние CLP+, то состояние фиксации задания принимает значение CLP-.
Для получения более подробной информации о фиксации выxода ознакомьтесь с:
|