
5.5.2.2.5.1.1. VELLIM | ОГРАНИЧИТЕЛЬ СКОРОСТИ
Ограничитель скорости (VELLIM) выводит изменение в единицу времени, ограничивая пределами скорости. Ограничитель скорости может применяться в процессе управления, в котором необходимо избежать резких изменений.
Ограничитель скорости (VELLIM) выполняет обработку вычисления управляющего воздействия на сигналы заданий и генерирует на выходе изменение в единицу времени, ограничивая его пределами скорости. Обработка ограничения скорости выполняется в каскадном (CAS) или автоматическом (AUT) режимах.
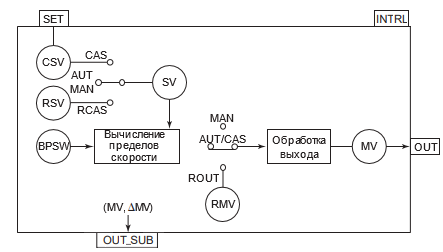
Ограничитель скорости (VELLIM) считывает резко изменяющийся управляющий выход (MV) других функциональных блоков, как сигнал задания каскада, и выводит его изменение за период сканирования ПЛК, как управляющий выход (MV), ограничивая его пределами скорости. В автоматическом (AUT) режиме этот блок выводит изменение за период сканирования ПЛК величины уставки (SV), ограничения его пределами скорости. Для направления вверх и вниз могут быть установлены отдельные ограничения скорости.
Рисунок ниже показывает функциональную блок-схему блока ограничителя скорости (VELLIM):
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов блока ограничителя скорости (VELLIM):
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
SET
|
Вход задания
|
Запись
|
-
|
-
|
x
|
|
OUT
|
Выход
|
Чтение
|
-
|
x
| |
|
OUT_SUB
|
Дополнительный выход
|
Чтение
|
-
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Назначение блока ограничителя скорости (VELLIM)
Блок VELLIM выполняет обработку вычислений, выхода и аварийной сигнализации.
Список доступных типов обработки выхода функционального блока VELLIM:
Вспомогательный выход MV
Вспомогательный выход ∆MV
Нет преобразования
Аналоговый выход
Выход подсистемы
Список доступных тревог функционального блока VELLIM:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
Список доступных режимов функционального блока VELLIM:
Для получения более подробной информации об обработке выxода ознакомьтесь с:
Для получения более подробной информации об обработке аварийной сигнализации ознакомьтесь с:
|
Обработка управляющих вычислений блока ограничителя скорости (VELLIM)
В таблице ниже показаны функции обработки управляющих вычислений блока ограничителя скорости (VELLIM):
|
Обработка управляющих вычислений
|
Описание
|
|
Расчет ограничения скорости
|
Выполняется ограничение скорости по значению уставки (SV) с получением управляющего выхода (MV).
|
|
Действие управляющего выхода
|
Осуществляется преобразование изменения управляющего выхода (ΔMV) в течение каждого периода управления в действительный управляющий выход (MV). Допустимо управляющее действие только «позиционного типа».
|
|
Ограничитель задания
|
Выполняется ограничение задания (SV) в рамках пределов (SVH, SVL).
|
|
Уравнивание заданий
|
Осуществляется согласование двух из трех заданий (SV, CSV, RSV) с третьим.
|
|
Безударное переключение
|
Переключение значения управляющего выхода (MV) без резкого изменения при переходе блока на другой режим или при переключении значения управляющего выхода (MV) во вторичном блоке в каскадном соединении.
|
|
Уравновешивание при безударном переключении
|
Выполняется преобразование диапазона управляющего выхода (MV) на основе диапазона задания и вычисляется новое значение задания. Это предотвращает резкое изменение выходного сигнала.
|
|
Ручная инициализация
|
Смена режима блока на IMAN для временной остановки управляющего действия. Данная функция работает в случае создания условия ручной инициализации.
|
|
Аварийный переход в ручной режим
|
Изменение режима блока на MAN для принудительной остановки управляющего выхода. Данная функция работает при выполнении условия аварийного перехода на ручной режим.
|
|
Аварийный переход в автоматический режим
|
Изменяется режим блока на AUT, когда функциональный блок работает в режиме CAS, так что автоматическое управление продолжается в соответствии с уставками. Данное действие выполняется при удовлетворении условия перехода на автоматический аварийный режим.
|
|
Неисправность удаленной подсистемы
|
Временно приостанавливается автоматическое управление, и происходит переключение в резервный режим при обнаружении ошибки в удаленной подсистеме в то время, как функциональный блок работает в режиме RCAS или ROUT. Данное действие реализуется, когда удовлетворяется условие сбоя в работе удаленной подсистемы.
|
|
Блокировка изменения режима блока
|
Прекращается автоматическая работа действующих в настоящее время функциональных блоков, одновременно не позволяя неработающим блокам переходить на режим автоматического управления.
|
Обработка сигнализации, характерная для блока ограничителя скорости (VELLIM)
Наряду с общими проверками сигнализации, выполняемыми блоком VELLIM, данный функциональный блок также выполняет процедуру формирования дополнительной сигнализации «проверка тревоги по отклонению».
Вычисление ограничения скорости
Эта функция выполняет вычисление ограничения скорости по значению задания в автоматическом (AUT), каскадном (RCAS) или внешнем каскадном (RCAS) режимах и использует результат вычисления в качестве управляющего выхода (MV).
Действие вычисления ограничения скорости зависит от того, превосходит ли скорость изменения SV предельные значения или находится внутри этих пределов.
Если скорость изменения SV находится внутри пределов скорости, то значение SV подвергается обработке ограничения скорости и преобразуется в значение диапазона MV для использования в качестве MV. Расчетное выражение для вычисления данного ограничения скорости дано ниже:
 где MVc – значение вычисленного управляемого выхода;
MVn – значение текущего управляемого выхода;
SSH – верхний предел шкалы SV;
SSL – нижний предел шкалы SV.
MSH – верхний предел шкалы МV;
MSL – нижний предел шкалы МV.
|
Если скорость изменения SV выходит за пределы скорости, то значение SV подвергается обработке ограничения скорости и преобразуется в значение диапазона MV для использования в качестве управляющего выхода. Расчетное выражение для вычисления данного ограничения скорости дано ниже:
MVn = MVn-1 + Dmp (при ΔMV >= Dmp)
MVn = MVn-1 - Dmm (при ΔMV <= Dmm)
ΔMV = MVn - MVn-1
где Dmp – значение скорости изменения за скан ПЛК в диапазоне MV, преобразованное из значения предела скорости вверх (DMVP);
Dmm – значение скорости изменения за скан ПЛК в диапазоне MV, преобразованное из значения предела скорости вниз (DMVM).
|
Действие управляющего выхода
Действие управляющего выхода преобразует приращения управляющего выхода (ΔMV) в течение каждого периода управления в действительный управляющий выход (MV).
Действие управляющего выхода блока ограничителя скорости принадлежит к «позиционному типу». Результат вычисления ограничения скорости выводится как текущий регулируемый выход (MV).
Ограничитель задания
Функция ограничителя задания состоит в ограничении значения задания (SV) внутри диапазона между верхним пределом задания (SVH) и нижним пределом задания (SVL) и в признании достоверными только значений задания (SV), лежащих внутри диапазона.
Для получения более подробной информации об ограничителе задания ознакомьтесь с:
|
Уравнивание заданий
Функция уравнивания заданий устанавливает одинаковые значения трем типам задания (SV, CSV, RSV).
Действие в автоматическом (AUT) или ручном (MAN) режиме заставляет значение задания при каскадном управлении (CSV) и внешнее задание (RSV) согласовываться со значением задания (SV). Даже, когда значение данных присвоено значению задания (SV) извне функционального блока, тоже самое значение автоматически присваивается и значению задания при каскадном управлении (CSV) и
внешнему заданию (RSV).
Действие в каскадном режиме (CAS) заставляет значение задания (SV) и внешнее задание (RSV) согласовываться со значением задания при каскадном управлении (CSV).
Действие в режиме внешнего каскада (RCAS) заставляет значение задания (SV) и значение задания при каскадном управлении (CSV) согласовываться со значением внешнего задания (RSV).
Безударное переключение
Функция безударного перехода переключает режим функционального блока или регулируемый выход (MV) вторичного блока в каскадном контуре без резкого изменения регулируемого выхода (MV) (то есть, безударное переключение).
Действия в процессе безударного перехода зависят от действия управляющего выхода и состояния режима блока.
Безударный переход, выполняемый блоком ограничителя скорости (VELLIM), имеет тип «возврат выхода».
В ручном (MAN) режиме или в режиме ручной инициализации (IMAN) функция возврата выхода устанавливает в качестве здания (SV) величину, преобразованную из управляющего выхода (MV) к диапазону SV. Также, если режимом блока не являются ни внешний выход (ROUT), ни нерабочий (O/S) режим, внешний управляющий выход (RMV) выполняет отслеживание значения управляющего выхода (MV).
Активация функции возврата выхода осуществляется в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.OUT_PUSHBACK установкой значения TRUE.
Использование функции возврата выхода делает возможным безударное переключение без балансировки режима блока с ручного (MAN) на автоматический (AUT).
Ручная инициализация
Ручная инициализация — это функция обработки ошибки, которая временно приостанавливает действие управления путем изменения режима блока на ручную инициализацию (IMAN). Это действие имеет место, когда выполняются условия ручной инициализации.
Функция ручной инициализации временно приостанавливает действие управления и управление выходным сигналом во время автоматического режима (AUT) или другого режима работы автоматического управления, когда выполняются условия ручной
инициализации, и изменяет режим функционального блока на ручную инициализацию (IMAN).
В режиме ручной инициализации заставляет управляющий выход (MV) отслеживать значение выходного блока.
Блок возвращается в исходный режим, когда перестает действовать условие ручной инициализации. Однако, если попытаться изменить режим блока, находящегося в режиме ручной инициализации (IMAN), то блок переключится на предложенный режим только тогда, когда перестанет действовать условие ручной инициализации.
Условие ручной инициализации - это условие перехода режима блока, временно приостанавливающее управляющее действие и действие управляющего выхода путем изменения режима блока на ручную инициализацию (IMAN). Режим ручной инициализации (IMAN) активизируется только тогда, когда выполняется условие ручной инициализации. Условие ручной инициализации выполняется в следующих ситуациях:
Когда состояние данных выходного блока принимает значение CND (т.е. каскадное соединение разомкнуто).
Когда состояние данных выходного блока принимает значение PFAL (т.е. аппартаная неисправность).
Аварийный переход в ручной режим
Аварийный переход в ручной режим представляет собой функцию обработки ошибки, которая останавливает автоматическое управление и заставляет функциональный блок перейти в состояние ручного управления. Это действие происходит при выполнении условия ручного перехода в аварийный режим.
Аварийный переход в ручной режим останавливает автоматическое управление, изменяя режим функционального блока на ручной (MAN), независимо от текущего состояния работы, и заставляет функциональный блок перейти в состояние ручного управления.
Если выполнено условие аварийного перехода на ручной режим, режим блока остается ручным (MAN), даже если это условие перестанет действовать.
Выполнение условия аварийного перехода в ручной режим указывает на возникновение критической ошибки.
Условие аварийного перехода в ручной режим выполняется в следующих ситуациях:
Когда состояние данных задания (SV) становится плохим (BAD).
Когда выполняется условие блокировки изменения режима блока.
Аварийный переход в автоматический режим
Аварийный переход в автоматический режим - это функция обработки ошибки, которая переключает режим блока с каскадного (CAS) на автоматический (AUT), когда выполняется условие аварийного перехода в автоматический режим.
При данном аварийном переходе изменяется режим блока с каскадного (CAS) на автоматический (AUT) для продолжения управления с использованием значений, заданных от внешней логики.
Как только выполнилось условие аварийного перехода в автоматический режим, режим блока останется автоматическим (AUT), даже когда перестанет действовать это условие.
Активация функции аварийного перехода в автоматический режим осуществляется в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.AUT_FALLBACK установкой значения TRUE.
Условие аварийного перехода в автоматический режим выполняется, когда состояние данных входа уставки каскадного (SET) стало
плохим (BAD) при работе блока в каскадном режиме (CAS).
Неисправность удаленной подсистемы
В случае неисправности удаленной подсистемы функциональный блок временно приостанавливает работу в режиме удаленного каскада (RCAS) или в режиме удаленного вывода (ROUT) и переходит в резервный режим.
В режиме удаленного каскада (RCAS) или в режиме удаленного вывода (ROUT) функциональный блок получает значение уставки (SV) или значение управляющего выхода (MV) от удаленной подсистемы.
При неисправности удаленной подсистемы блок переходит в предварительно установленный резервный режим (MAN, AUT или CAS), что свидетельствует о возникновении неисправности в удаленной подсистеме. При возвращении удаленной подсистемы в нормальное состояние блок возвращается в исходный режим.
Следующие действия осуществляются, когда действует условие неисправности удаленной подсистемы, и посылается команда смены режима блока c MAN, AUT или CAS на RCAS или ROUT:
1. При посылке команды перехода блока из режима MAN, AUT или CAS в режим RCAS или ROUT во время неисправности удаленной подсистемы (BSW = TRUE), функциональный блок переходит в резервный режим не сразу, а только после переключения в переходное состояние. Переходное состояние - это смешанный режим блока, сочетающий в себе режим блока до команды перехода (MAN, AUT, CAS) и удаленный режим (RCAS, ROUT).
2. В ходе первого цикла сканирования ПЛК после выполнения команды изменения режима блока функциональный блок проверяет состояние удаленной подсистемы и переходит в смешанный режим, сочетающий в себе резервный режим (MAN, AUT, CAS) и удаленный режим (RCAS, ROUT).
3. Если во время работы функционального блока в резервном режиме удаленная подсистема возвращается в нормальное состояние, то режим блока меняется на удаленный каскад (RCAS) или удаленный вывод (ROUT).
Условие неисправности удаленной подсистемы - это условие переключения блока в переходное состояние, во время которого работа в режиме удаленного каскада (RCAS) или удаленного вывода (ROUT) приостанавливается, и происходит переход в резервный режим.
Для задания режима удаленного каскада (RCAS) или удаленного вывода (ROUT) в функциональном блоке предусмотрен резервный переключатель (BSW). Состояние данного переключателя указывает на неисправность удаленной подсистемы или ее возвращение в нормальное состояние.
Переключение в резервный режим не работает в случае текущего режима блока, отличного от режима удаленного каскада (RCAS) или удаленного вывода (ROUT).
Переключатель дублирования (BSW) может принимать следующие значения:
BSW = TRUE указывает на неисправность удаленной подсистемы;
BSW = FALSE указывает на восстановление удаленной подсистемы.
Резервный режим задается в среде Astra.IDE с помощью конфигурационного параметра CONFIG.CONTR_CALC.COMP_BCKP_MODE установкой значений MAN, AUT или CAS.
Блокировка изменения режима блока
При создании условия блокировки изменения режима блока происходит остановка процедуры расчета управляющих воздействий функционального блока, работающего в автоматическом режиме, и налагается запрет на переход функционального блока в режим автоматической работы.
Остановка процедуры расчета управляющего воздействия функционального блока, работающего в автоматическом режиме, и блокировка перехода остановленных функциональных блоков в автоматический режим. При этом происходит следующее:
Режим блока меняется на ручной (MAN);
Любая команда на переход блока в автоматический режим (AUT, CAS, RCAS или ROUT) блокируется.
Условие блокировки изменения режима блока выполняется, когда вход переключателя блокировки (INTRLK) переводится во включенное состояние (TRUE) из-за невозможности продолжения работы в автоматическом режиме при возникновении нештатной ситуации на установке.
Проверка тревоги по отклонению
Проверка тревоги по отклонению в блоке VELLIM имеет отношение к отклонению (DV) между значением управляющего выхода (MV), приведенное к диапазону задания (SV), и значением задания (SV).
Когда абсолютное значение отклонения (DV) превосходит абсолютное значение уставки сигнализации отклонения (DL), срабатывает сигнализация отклонения или в положительном направлении (DV+), или в отрицательном направлении (DV-). Если после срабатывания сигнализации абсолютное значение отклонения падает ниже абсолютного значения уставки сигнализации отклонения (DL) за вычетом значения гистерезиса (HYS), то сигнализация возвращается в нормальное состояние.
При проверке сигнализации отклонения в блоке VELLIM отсутствует функция фильтрации проверки отклонения.
Отклонение (DV), являющееся объектом проверки сигнализации отклонения в блоке VELLIM, вычисляется следующим образом:
DV = MVs - SV
 где MVs – значение управляемого выхода (MV) после приведения к диапазону SV;
SSH – верхний предел шкалы SV;
SSL – нижний предел шкалы SV.
MSH – верхний предел шкалы МV;
MSL – нижний предел шкалы МV.
|
Когда абсолютное значение отклонения (DV) превосходит абсолютное значение уставки сигнализации отклонения (DL) и это отклонение имеет положительное направление, то срабатывает сигнализация отклонения в положительном направлении (DV+). Если отклонение имеет отрицательное направление, то срабатывает сигнализация отклонения в отрицательном направлении (DV-). Если после срабатывания сигнализации абсолютное
значение отклонения падает ниже абсолютного значения уставки сигнализации отклонения (DL) за вычетом значения гистерезиса (HYS), то сигнализация возвращается в нормальное состояние.
Кроме того, если в качестве задания сигнализации отклонения (DL) задается то же значение, что и для диапазона шкалы SV (положительное значение), то не проводится проверки сигнализация отклонения ни положительного, ни отрицательного направления.
Для настройки функции проверки тревоги по отклонению могут быть заданы тип проверки сигнализации по отклонению, уставка сигнализации
отклонения (DL) и значение гистерезиса сигнализации.
Настройка типа проверки сигнализации по отклонению осуществляется в среде Astra.IDE с помощью конфигурационного параметра CONFIG.ALARM.DEVIATION, который может иметь следующие значения:
NO (нет обнаружения). Обнаружение не выполняется.
SINGLE (обнаружение в одном направлении). Контролирует отклонение или в положительном, или в отрицательном направлении.
BOTH (обнаружение в обоих направлениях). Контролирует отклонение как в положительном, так и в отрицательном направлении.
Когда в качестве типа проверки сигнализации отклонения выбирается обнаружение в одном направлении, то контролируется отклонение только в положительном направлении при положительной уставке сигнализации отклонения (DL) или только в отрицательном направлении при отрицательной уставке сигнализации отклонения. Поэтому когда в качестве типа проверки сигнализации отклонения выбирается обнаружение в одном направлении, то добавьте знак (+ или -) к уставке сигнализации отклонения (DL) для определения требуемого направления проверки.
Настройка значения гистерезиса тревоги по отклонению осуществляется в среде Astra.IDE с помощью конфигурационного параметра CONFIG.ALARM.DV_HYST.