5.5.2.3.5.5.1. Алгоритм

Функциональный блок TYP_MOT_VSD_REV выполнен на основе базового функционального блока MC_3E и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Обработка концевых выключателей и формирование входа ответного сигнала (PV).
| |
|
Сравнение значения входа ответного сигнала (PV) со значением управляющего выхода (MV) для проверки соответствия между работой исполнительного элемента и выходными сигналами блока управления двигателем.
| |
|
Значение PV не формируется по состоянию концевиков (входы IN1, IN2), а задается оператором вручную. Реальное значение концевиков (входы IN1, IN2) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Имитирует внутреннюю обработку блоков управления двигателем. Не формируется значение PV (удержание предыдущего значения) и не обрабатывается вход блокировки IL. Реальное значение концевиков (входы IN1, IN2) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Обход функций в соответствии с состоянием переключателя команды байпаса.
| |
|
Формирование команд управления в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
|
При выборе местного режима блок переходит в режим слежения (TRK), т.е. управление двигателем может осуществляться только по месту (блок будет следовать сигналам поля). Местный пуск (вперед или назад) возможен только в том случае, если разрешение активировано оператором через HMI (выход ENABLE). Разрешение можно установить только тогда, когда механизм готов и не имеет неисправностей, двигатель не работает, технологические блокировки не активны. Во всех остальных случаях разрешающий сигнал будет сброшен.
Список доступных режимов функционального блока TYP_MOT:
Нельзя подавать команду FORWARD, если двигатель работает в режиме реверса, и нельзя подавать команду REVERSE, если двигатель работает в прямом направлении. Функционал работы реализован так, как описано ниже:
если оператор подает команду FORWARD, когда двигатель не работает, то эта команда немедленно передается на механизм;
если оператор подает команду STOP, то эта команда всегда всегда немедленно передается на механизм;
если оператор подает команду "REVERSE" при неработающем двигателе, то эта команда немедленно передается на механизм;
Внутренний функциональный блок INDST3 обеспечивает функциональность ПЧ, позволяя оператору записывать значение для управления скоростью двигателя и видеть индикацию фактической скорости. Скорость двигателя может регулироваться внешней логикой (ПИД-регулирование) и в этом случае внутренний функциональный блок INDST3 будет в режиме CAS или оператором и в этом случае INDST3 находится в режиме MAN.
Вход блокировки (TT) внутреннего функционального блока MC_3E подключается к сигналу отказа. Срабатывание блокировки переведет блок в ручной режим (MAN) и остановит двигатель. В этом случае появится индикация тревоги TRIP.
Работа блока в ручном режиме
Управление мотором в ручном режиме осуществляется оператором при условии отсутствия блокировок и наличия разрешающих сигналов пуска (вход EN_START = FALSE) и останова (вход EN_STOP = FALSE).
Переход блока в режим MAN может происходить по команде от оператора или после окончания действия внешних команд пуска/останова при отключенном удержании автоматического режима (вход HLD_AUT = FALSE), а именно, при пуске мотора от внешней команды EX_START_FWD или EX_START_REV блок перейдет в режим MAN после окончания импульсной команды пуска (значение EX_START_FWD и EX_START_REV при этом становится не важно) и при останове мотора от внешней команды EX_STOP блок перейдет в режим MAN после ее деактивации (вход EX_STOP = FALSE).
Работа блока в автоматическом режиме
Управление мотором в автоматическом режиме осуществляется от внешних команд пуска (входы EX_START_FWD и EX_START_REV) и останова (вход EX_STOP) при условии отсутствия блокировок и наличия разрешающих сигналов пуска (вход EN_START = FALSE) и останова (вход EN_STOP = FALSE).
Переход блока в режим AUT может происходить по команде от оператора, от внешних команд пуска/останова при отсутствии соответствующего запрета (вход DIS_EX_AUT = FALSE) или при отсутствии разрешающего сигнала пуска (вход EN_START = TRUE) при остановленном моторе и разрешающего сигнала останова (вход EN_STOP = TRUE) при запущенном моторе.
При этом в режиме блока MAN при наличии запрета перехода в автоматический режим от внешних команд (вход DIS_EX_AUT = TRUE) внешние команды игнорируются, а при отсутствии запрета (вход DIS_EX_AUT = FALSE) управление блоком от внешних команд осуществляется следующим образом:
Активация функции "Внешний пуск" (вход EX_START_FWD = TRUE или EX_START_REV = TRUE) переводит блок в режим AUT (если блок не был предварительно переведен оператором) и автоматически запускает мотор. Если удержание автоматического режима отключено (вход HLD_AUT = FALSE), то по окончании заданного периода времени происходит переход в режим MAN (независимо от значения внешней команды на входе EX_START_FWD или EX_START_REV. Если удержание автоматического режима включено (вход HLD_AUT = TRUE), то по окончании заданного периода времени будет удерживаться режим AUT (независимо от значения внешней команды на входе EX_START_FWD и EX_START_REV).
Активация функции "Внешний останов" (вход EX_STOP = TRUE) переводит блок в режим AUT (если блок не был предварительно переведен оператором) и автоматически останавливает мотор. Если удержание автоматического режима отключено (вход HLD_AUT = FALSE), то блок будет автоматически переведен в режим MAN после деактивации внешней команды (вход EX_STOP = FALSE). Если удержание автоматического режима включено (вход HLD_AUT = TRUE), то при деактивации внешней команды будет удерживаться режим AUT (не зависимо от значения внешней команды на входе EX_STOP).
Блок может быть настроен на работу в импульсном или потенциальном режимах. Если входному параметру TYPE_CTRL задано значение IMP, то блок работает в режиме импульсного управления. Если входному параметру TYPE_CTRL задано значение POT, то блок работает в режиме потенциального управления.
При импульсном управлении (TYPE_CTRL = IMP) команда пуска в прямом или обратном направлениях от оператора (локально или дистанционно) или от внешней логики формирует на соответствующем выходе START_FWD или START_REV блока импульс заданной длины. Команда останова от оператора (локально или дистанционно) или от внешней логики формирует соответствующий импульс на выходе STOP.
При потенциальном управлении (TYPE_CTRL = POT) выход блока STOP не используется. Команда пуска в прямом или обратном направлениях от оператора (локально или дистанционно) или от внешней логики формирует на соответствующем выходе START_FWD или START_REV значение TRUE, а команда останова – значение FALSE.
Управление выходом команды разрешения от оператора
Управление выходом ENABLE осуществляется на АРМ оператора в окне разрешения от оператора, которое вызывается при нажатии на индикатор режима управления (R/L) мнемосимвола блока. Доступность управления выходом ENABLE для типов управления "МЕСТН." и "ДИСТ." зависит от настройки конфигурационного параметра ENABLE_CONTR_TYPE (тип управления, при котором формируется выход ENABLE) типа ENUM_CONTR_TYPE, для которого возможны следующие значения:
LOCAL (местный режим). Управление доступно при нахождении переключателя мотора в положении "МЕСТН.". При этом при нахождении переключателя мотора в положении "ДИСТ." выход ENABLE принудительно переводится в FALSE.
REMOTE (дистанционный режим). Управление доступно при нахождении переключателя мотора в положении "ДИСТ.". При этом при нахождении переключателя мотора в положении "МЕСТН." выход ENABLE принудительно переводится в FALSE.
ALL (оба режима). Управление доступно в обоих режимах.
Настройка блока
Функциональный блок должен быть настроен на работу с сигналом блокировки входа IL типа ETS. Для этого необходимо для конфигурационного параметра типа "Control Calculation" задать прямое направление входного сигнала блокировки (INTRLK_DIR).
Задайте конфигурационному параметру CONFIG.CONTR_CALC.INTRLK_DIR значение DIRECT.
|
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
По умолчанию для данного типового блока включена сигнализация обратного ответа (ANS+/-). Этот сигнал указывает на состояние, в котором выполняется проверка обратного ответа, а управляющее выходное значение (MV) работы двигателя и переменная процесса обратного ответа (PV) не совпадают. Сигнал об ответе формируется по истечении заданного времени (MTM, настраивается в секундах). Данный параметр определяет время, необходимое оборудованию для достижения заданного состояния (например, состояние "работает" после подачи команды "пуск" или "отключен" после подачи команды "останов")
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока TYP_MOT_VSD_REV:
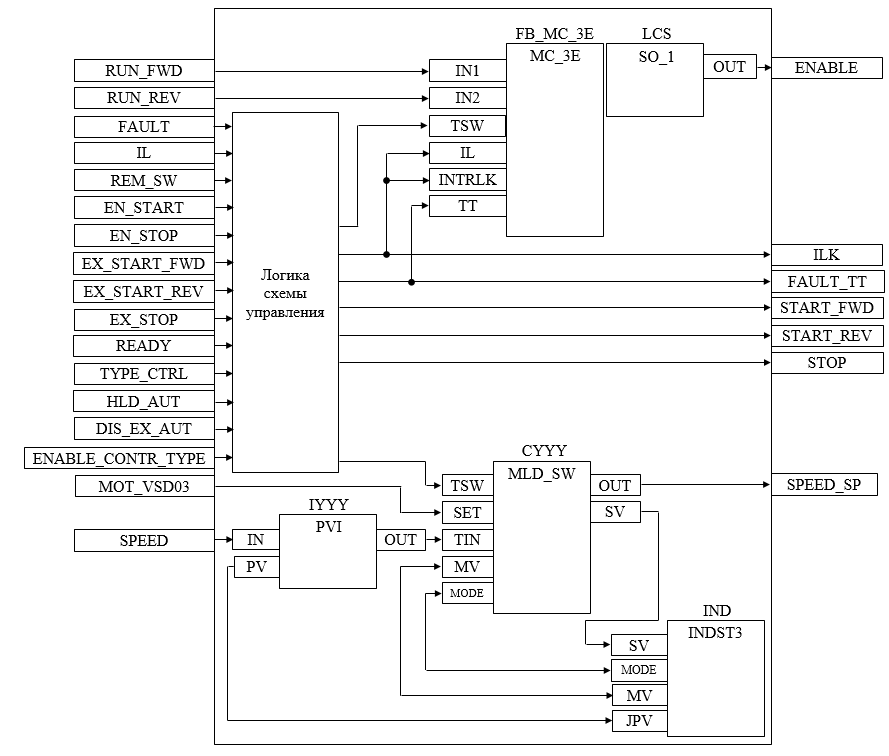
Состав элементов блока TYP_MOT_VSD_REV:
Блок FB_MC_3E базового типа MC_3E используется для передачи команд пуска вперед/пуска назад/останова оператором и для отображения состояния двигателя.
Блок LCS базового типа SO_1 используется для формирования команды разрешения (выход ENABLE) от оператора.
Блок IYYY базового типа PVI используется для приема и обработки сигнала частоты вращения двигателя.
Блок СYYY базового типа MLD_SW используется для обработки окончательного значения выхода для задания частоты вращения двигателя.
Подпрограмма логики схемы управления используется для приема и обработки команд пуска/останова/разрешения пуска/разрешения останова от внешней логики с принудительным переводом блока в автоматический и ручной режим в зависимости от конфигурационных параметров HLD_AUT и DIS_EX_AUT, для управления блоком LCS в зависимости от конфигурационного параметра ENABLE_CONTR_TYPE, для формирования команд пуска/останова в зависимости от конфигурационного параметра TYPE_CTRL и для формирования обобщенных сигналов блокировки и неисправности двигателя.
Блок IND базового типа INDST3 используется для предоставлении обобщенного графического интерфейса для блоков IYYY и CYYY в HMI, а именно индикация частоты вращения двигателя (переменная IND_PV), индикация уставки задания частоты (переменная IND_SV), индикация/задание частоты вращения двигателя (переменная IND_MV) и индикация/задание режима блока CYYY (переменная IND_MODE) в рабочем окне и окне параметров мнемосимвола окна ввода частоты.
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов блока TYP_MOT_VSD_REV:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
RUN_FWD
|
Сигнал вращения в прямом направлении
|
Запись
|
x
|
x
| |
|
RUN_REV
|
Сигнал вращения в обратном направлении
|
Запись
|
x
|
x
| |
|
FAULT
|
Неисправность
|
Запись
|
x
|
x
| |
|
IL
|
Входной сигнал блокировки работы
|
Запись
|
x
|
x
| |
|
REM_SW
|
Переключатель "МЕСТН./ДИСТ."
|
Запись
|
x
|
x
| |
|
READY
|
Готовность
|
Запись
|
x
|
x
| |
|
START_FWD
|
Команда пуска в прямом направлении
|
Чтение
|
x
|
x
| |
|
START_REV
|
Команда пуска в обратном направлении
|
Чтение
|
x
|
x
| |
|
STOP
|
Команда останова
|
Чтение
|
x
|
x
| |
|
ENABLE
|
Команда разрешения
|
Чтение
|
x
|
x
| |
|
SPEED
|
Вход текущей скорости
|
Запись
|
x
|
x
| |
|
MOT_VSD01
|
Задание скорости от внешней логики
|
Запись
|
-
|
x
|
x
|
|
SPEED_SP
|
Задание скорости
|
Чтение
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено