5.5.2.4.8.1.1. Алгоритм
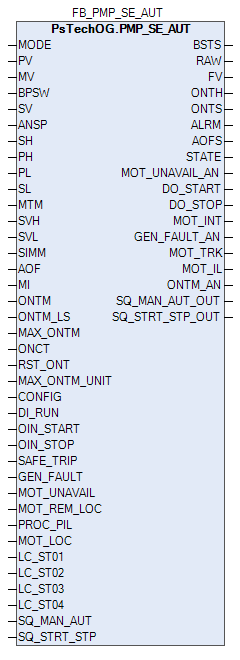
Технологический функциональный блок PMP_SE_AUT выполнен на основе базового функционального блока MC_2E и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Обработка концевых выключателей и формирование входа ответного сигнала (PV).
| |
|
Сравнение значения входа ответного сигнала (PV) со значением управляющего выхода (MV) для проверки соответствия между работой исполнительного элемента и выходными сигналами блока управления двигателем.
| |
|
Значение PV не формируется по состоянию концевиков (входы IN1, IN2), а задается оператором вручную. Реальное значение концевиков (входы IN1, IN2) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Имитирует внутреннюю обработку блоков управления двигателем. Не формируется значение PV (удержание предыдущего значения) и не обрабатывается вход блокировки IL. Реальное значение концевиков (входы IN1, IN2) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Обход функций в соответствии с состоянием переключателя команды байпаса.
| |
|
Формирование команд управления в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Принудительный запрет формирования некоторых тревог по ремонтируемому оборудованию.
|
Список доступных режимов функционального блока PMP_SE_AUT:
Основные функции
Ниже приведены основные функции для типового элемента насоса:
обработка обнаружения отклонения и состояния переключателя входа полевого устройства;
взаимодействие со стандартными программными модулями более высокого уровня: состояние и неисправность, команда открытия / закрытия, автономный режим;
использование команд оператора: запуск / останов, запрет технического обслуживания;
мониторинг технического обслуживания.
Подробное описание
Состояние команды исполнения: От АСУТП передаются команды запуска и останова.
Состояние электродвигателя: Состояние электродвигателя по сигналу от полевого устройства, либо работа, либо останов. Для отображения внутреннего состояния этот сигнал не учитывается, если включен запрет технического обслуживания.
Состояние готовности: Этот сигнал активен при нормальной работе, когда нет нарушения в электрической цепи, отключения по аварийному сигналу, локального аварийного останова или подключенной съемной электрической секции.
Состояние отклонения: Состояние отклонения будет активно в двух случаях:
Если во время исполнения команды MV=2 (команда пуска) состояние электродвигателя — не работает, т.е. PV=0, время таймера отклонения истекло (параметр MTM, регулируемый по параметру настройки), а запрет технического обслуживания не включен, в АСУТП генерируется аварийный сигнал об отклонении ANS+.
Если во время исполнения команды MV=0 (команда останова) состояние электродвигателя — работает, т.е. PV=2, время таймера отклонения истекло (параметр MTM, регулируемый по параметру настройки), а запрет технического обслуживания не включен, в АСУТП генерируется аварийный сигнал об отклонении ANS-.
Аварийный сигнал об отклонении не активируется, если нет сигнала готовности.
Локальное / дистанционное состояние: Селекторный переключатель, имеющийся в полевом устройстве. Когда переключатель переведен в положение дистанционный режим, сигнал пуска / останова электродвигателя поступает из АСУТП. Когда переключатель переведен в положение локальный режим, управление осуществляется локально / с полевого устройства, только сигнал останова может быть получен из АСУТП. Электродвигатель может быть остановлен в любой момент времени с локального пульта управления.
При защитной блокировке электродвигатель отключится независимо от режима, локального или дистанционного.
Состояние ошибки входа / выхода: Этот состояние извещает об отказе аппаратных средств. В случае неисправности последовательного канала передачи данных электродвигатель сохраняет предыдущее состояние и генерируется сигнал неисправности канала. После восстановления последовательного канала передачи данных состояние электродвигателя соответствует состоянию входа.
Режим Автономный / Автоматический: Когда электродвигатель находится в автономном состоянии (режим РУЧН), электродвигатель управляется либо дистанционно оператором, либо с полевого устройства с учетом дистанционного / локального выбора, если имеется дистанционный / локальный выбор, или же электродвигатель управляется дистанционного, если дистанционного / локального выбора нет.
Когда электродвигатель работает в автоматическом режиме (АВТО), он управляется автоматическим управлением более высокого уровня, например, насосной установкой, DBS или любой логикой.
Команда пуска / останова: Оператор передает команду через блок MC-2Е, к которому оператор получает доступ на экране управления технологическим процессом, когда электродвигатель работает в автономном режиме.
Команда Пуск / Останов передается из автоматического управления более высокого уровня, когда клапан электродвигатель работает в автоматическом режиме (АВТО).
Команда принудительно переводится на останов в результате:
открытия всасывающего клапана, не активного при работе насоса;
защитного отключения или блокировки технологического процесса;
состояния отклонения;
состояния неготовности.
Запрет техобслуживания: Эта команда доступна в ЧМИ для оператора с управляющим уровнем доступа.
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока PMP_SE_AUT:
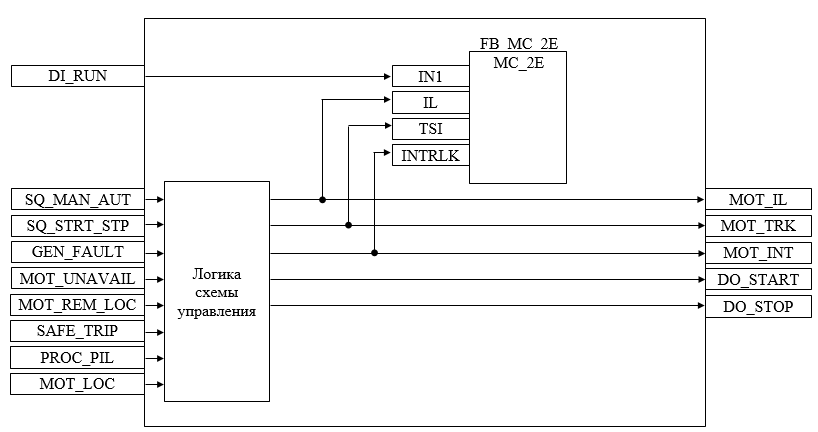
Состав элементов блока PMP_SE_AUT:
Блок FB_MC_2E базового типа MC_2E используется для передачи команд исполнения оператором и для отображения состояния насоса.
Подпрограмма логики схемы управления используется для пуска/останова, реализации автоматической/ручной логики и формирования сигналов блокировки.
В таблице ниже перечислены методы доступа к входам/выходам и адресаты соединения входов/выходов блока PMP_SE_AUT:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
DI_RUN
|
Концевой выключатель открытия
|
Запись
|
x
|
x
| |
|
GEN_FAULT
|
Общая авария
|
Запись
|
x
|
x
| |
|
MOT_UNAVAIL
|
Недоступность двигателя
|
Запись
|
x
|
x
| |
|
MOT_REM_LOC
|
Переключатель "ДИСТ./МЕСТН."
|
Запись
|
x
|
x
| |
|
SAFE_TRIP
|
Защита
|
Запись
|
x
|
x
| |
|
PROC_PIL
|
Блокировка процесса
|
Запись
|
x
|
x
| |
|
MOT_LOC
|
Блокировка двигателя
|
Запись
|
x
|
x
| |
|
DO_START
|
Команда "Пуск"
|
Чтение
|
x
|
x
| |
|
DO_STOP
|
Команда "Стоп"
|
Чтение
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено