5.5.2.4.12.5.1. Алгоритм

Технологический функциональный блок PID_RD выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции. В таблице ниже представлен список основных функций блока.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
| |
|
Принудительный запрет формирования некоторых тревог по ремонтируемому оборудованию.
|
В данном разделе описывается функция стандартного программного модуля ПИД-регулятора с резервными клапанами для систем АСУТП. Данный программный модуль используется для выполнения функции непрерывного контроля через ПИД-алгоритм. Этот программный модуль может быть связан с другим типовым элементом, например:
AI (аналоговый индикатор)
GCF (расход с компенсацией по температуре и давлению)
GCF_SQ (расход с компенсацией по температуре и давлению — извлечение квадратного корня)
Список доступных режимов функционального блока PID_RD:
Функциональная блок-схема
На рисунке ниже показана функциональная блок-схема блока PID_RD:
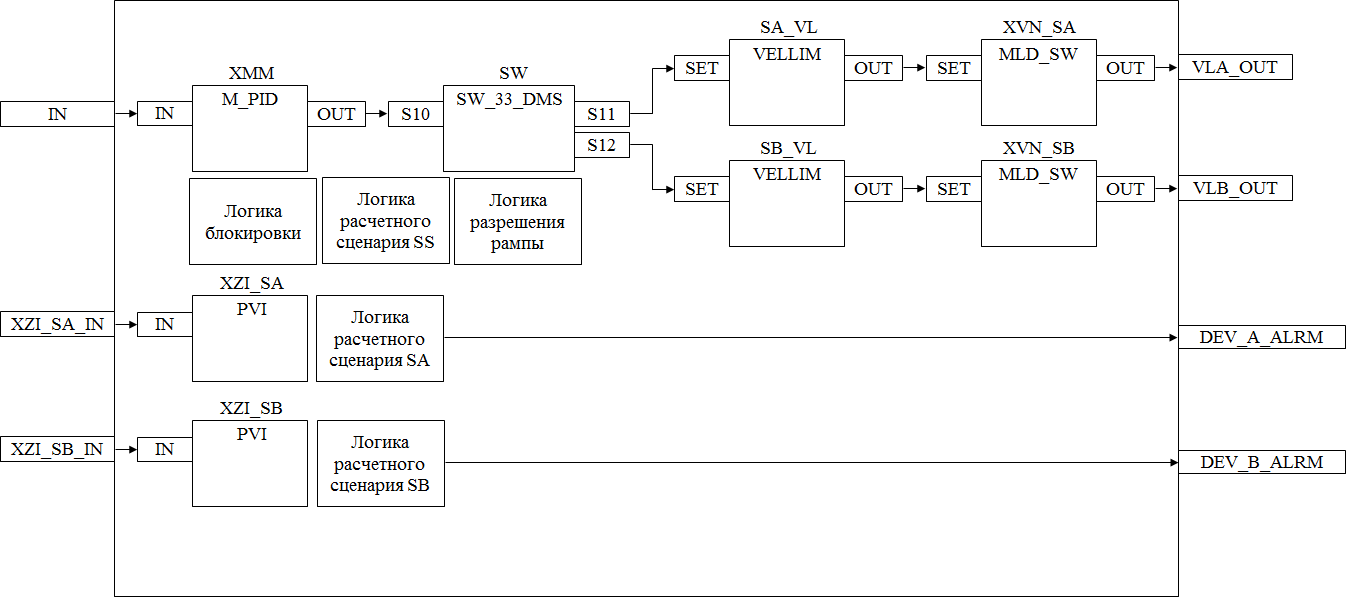
Состав элементов блока PID_RD:
Блок XMM базового типа M_PID обеспечивает функцию пропорционально-интегрально-дифференциального регулирования с учетом отклонения технологической переменной (PV) от значения уставки (SV).
Блок XZI_SA базового типа PVI используется для индикации значения позиционной обратной связи клапана A.
Блок XZI_SB базового типа PVI используется для индикации значения позиционной обратной связи клапана B.
Подпрограмма логики блокировки используется для логики блокировки.
Подпрограмма логики расчетного сценария SA используется для генерирования сигнала об отклонении клапана A.
Подпрограмма логики расчетного сценария SB используется для генерирования сигнала об отклонении клапана B.
Блок SA_VL базового типа VELLIM используется для функции линейного изменения для выхода для клапана A.
Блок SB_VL базового типа VELLIM используется для функции линейного изменения для выхода для клапана B.
Блок XVN_SA базового типа MLD_SW используется в качестве блока управления выходом задания положения для клапана A.
Блок XVN_SB базового типа MLD_SW используется в качестве блока управления выходом задания положения для клапана B.
Подпрограмма логики разрешения рампы используется для формирования сигналов разрешения/запрета функции линейного изменения выхода.
Подпрограмма логики расчетного сценария SS используется для принудительной устанавки клапанов в предопределенное положение.
Блок SW базового типа SW_33_DMS используется для передачи выходного сигнала регулятора на клапаны (возможность подключения нескольких клапанов к одному регулятору).
В таблице ниже перечислены методы доступа к входам/выходам и адресаты блока PID_RD:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
VLA_OUT
|
Выход управления клапаном A
|
Чтение
|
x
|
x
| |
|
VLB_OUT
|
Выход управления клапаном B
|
Чтение
|
x
|
x
| |
|
XZI_SA_IN
|
Вход обратной связи положения A
|
Запись
|
x
|
x
| |
|
XZI_SB_IN
|
Вход обратной связи положения B
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Основные функции
Ниже приведены основные функции типового элемента ПИД-регулятора, в следующем разделе дано подробное описание всех функций.
функция контроля с использованием ПИД-алгоритма
ошибка аналогового входа и выхода
запрет технического обслуживания измерения
останов технологического процесса (связанный с положением клапана и выключателем безопасности)
Подробное описание
Регулировка выхода:
Для закрытых при отказе клапанов FC, -- 0% для закрытия (4 мА) 100% для открытия (20 мА)
Для открытых при отказе клапанов FO, -- 0% для закрытия (20 мА) 100% для открытия (4 мА)
Подробное описание
Нормальные условия эксплуатации: В данном программном модуле оператор может выбрать клапан для работы. Выбранный клапан управляется ПИД-алгоритмом, а другой клапан (резервный) настроен на 0%.
Выбор клапана может выполняться либо оператором (режим РУЧН) либо по окончательному значению выхода ПИД-регулятора (режим АВТО/КАСКАД) при активном состоянии переключения на более высокий уровень управления. Оператор может управлять клапаном отдельно с лицевой панели с экрана HMI, удерживая блок управления выходом в режиме РУЧН. При переключении блока управления выходом на режим КАСКАД клапаны управляются ПИД-алгоритмом. Управление режимами ПИД-регулятора АВТО (КАСКАД) / РУЧНЫМ: ПИД- регулятор переключится на режим РУЧН, если выбранный клапан работает в режиме РУЧН. Когда оператор переключает выбранный клапан на режим КАСКАД, режим ПИД-регулятора может быть изменен на АВТО, таким образом, выбранный клапан управляется ПИД-алгоритмом.
ПИД-регулятор переключится на режим РУЧН, если оба клапана работают в режиме РУЧН. При выборе автоматического управления более высокого уровня оба клапана становятся активны.
Переход с режима АВТО (КАСКАД) на режим РУЧН: Окончательное значение выхода не изменяется, так как окончательное значение выхода согласуется с последним вычисленным значением. Переход с режима РУЧН на режим АВТО (КАСКАД): Выходной сигнал ПИД- регулятора согласуется с окончательным значением выхода выбранного клапана или клапана первого блока управления выходом, переключенного обратно в режим КАСКАД, в случае управления обоими клапанами.
Ограничение окончательного значения выхода ПИД-регулятора: Окончательное значение выхода ПИД-регулятора будет ограничено пороговым значение блока управления выходом; это реализуется активной по умолчанию функцией фиксации окончательного значения выхода ПИД-регулятора только в режиме АВТО.
Останов технологического процесса: Возможны два варианта:
В случае защитной блокировки выход ПИД-регулятора будет принудительно настроен на заданное состояние, и доступ оператора будет запрещен до отключения блокировки.
Для блокировки технологического процесса на выход ПИД-регулятора передается эталонное значение с помощью короткого импульса 2 с, при этом доступ оператора разрешен.
Состояние ошибки аналогового выхода: Разомкнутый выход OOP активирован, когда контур разомкнут или в случае неисправности соответствующей платы.
Функция запрета технического обслуживания: Когда соответствующее измерение запрещено, ПИД-алгоритм отключается, а окончательное значение выхода фиксируется на последнем вычисленном окончательном значении выхода. Оператор не может изменить уставку SV, ПИД-регулятор принудительно переключается в режим РУЧН, и оператор может изменить окончательное значение выхода из блоков управления выходом при активной функции запрета технического обслуживания.
Примечание: Когда вход (программный модуль аналогового входа), связанный с ПИД-регулятором, находится в состоянии ошибки (IOP+ или IOP-), ПИД- регулятор принудительно переключается в режим РУЧН, а исполнение алгоритма управления отключается.