
5.3.3.3.2.2.1. Алгоритм
Алгоритм позволяет:
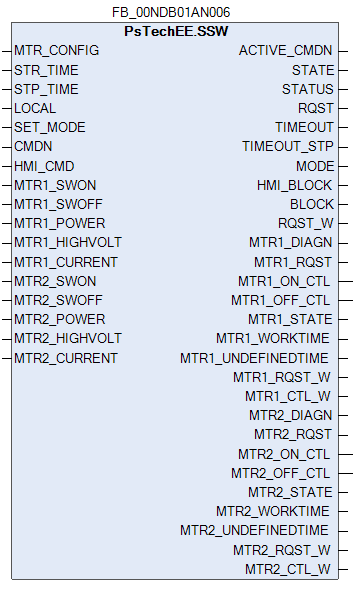
осуществлять управление двухскоростным двигателем от функций ТЗ, ТБ, ФГУ и ДУ с учетом приоритетов;
контролировать состояние механизма;
диагностировать функциональные и аппаратные отказы механизма.
Режимы работы
Для алгоритма предусмотрены следующие режимы работы:
-
Дистанционный. Основной режим работы исполнителя. В этом режиме работают команды групповых командных входов и ручного управления.
-
Опробование. В этом режиме команды и запреты командных входов кроме ручного управления блокируются.
-
Ремонтный. В этом режиме никакие выходные команды не формируются. Не выполняется также контроль состояния исполнителя и диагностика его неисправностей.
-
Местный. В этом режиме никакие команды не формируются, но работает контроль состояния механизма и диагностика его неисправностей, не связанных с формированием команд.
Состояние
|
Состояние
|
Описание
|
|
Нерабочее
|
1-ая скорость в неопределенном состоянии или обе скорости включены.
|
|
Отключен
|
Приводной вал останавливается или уже остановлен.
Условия формирования:
Обе скорости отключены и нет задания.
|
|
Разгон
|
Задержка перехода на скорость 2 из холодного состояния. Условия формирования:
1-ая скорость включена. Разгон длится заданное время разгона STR_TIME, а затем сменяется на Скорость 1.
|
|
Скорость 1
|
Есть необходимая для приема задания на 2ую скорость уверенность, что приводной вал вращается с 1-ой скоростью.
Условия формирования:
1-ая скорость включена и выполнен отсчет времени разгона STR_TIME.
|
|
Скорость 2
|
Включена 2-ая скорость.
|
|
Переключение
|
Идет переключение с одной скорости на другую и приводной вал вращается по инерции.
Условия формирования:
Обе скорости отключены и есть задание.
|
Управление
Входная команда, формирует соответствующее Задание, которое сохраняется даже после снятия команды со входа, до тех пор, пока команда не будет исполнена или запрещена.
Задание «на скорость 1» не принимается, если на входе CMD[N] есть признак запрета включения первой скорости.
Задание «на скорость 2» не принимается, если на входе CMD[N] есть признак запрета включения второй скорости или текущее состояние «Отключен».
Задание «Отключить» принимается к исполнению всегда.
|
Если задание перехода с одной скорости на другую не выполнилось из-за того, что нужная скорость не включилась, то выполняется возврат на прежнюю скорость.
Если одновременно действуют несколько входных команд, то выполняется самая приоритетная, а остальные команды игнорируются.
|
Приоритет устанавливается следующим образом:
-
Отключить
-
На скорость 1
-
На скорость 2
Начать включать 2-ую скорость можно только спустя время разгона STR_TIME после включения 1-ой скорости.
Начать включать 1-ую скорость можно только спустя время торможения STP_TIME после отключения 2-ой скорости.
На выход BLOCK передаются признаки действующих команд, причем N-й признак устанавливается, если на входе CMD[N] есть хотя бы одна команда или запрет возможного направления хода. BLOCK используется для отображения действующих команд и блокировок оператору.
Выполнение переключений
1. Текущее состояние «Отключен»
Входная команда «Включить скорость 1» формирует задание на включение скорости 1. При этом контролируется время MTR_CONFIG.IMPTIME. Если за время MTR_CONFIG.IMPTIME скорость 1 включилась, то осуществляется переход к состоянию «Разгон» и сброс задания, иначе – формируется сброс задания.
2. Текущее состояние «Разгон»
Запускается таймер на время разгона STR_TIME. Пока время разгона не истекло, запрещается переключение на скорость 2. По истечению времени разгона формируется состояние «Скорость 1».
Выход TIMEOUT показывает время до завершения текущего состояния «Разгон».
3. Текущее состояние «Скорость 1»
Входная команда «Включить скорость 2» формирует задание на отключение скорости 1. При этом контролируется время MTR_CONFIG.IMPTIME. Если за время MTR_CONFIG.IMPTIME скорость 1 выключилась, то формируется команда «Включить» к скорости 2, при этом происходит переход в состояние «Переключение скорости». Если за время MTR_CONFIG.IMPTIME скорость 1 не выключилась, то выполняется сброс задания.
4. Текущее состояние «Переключение» с 1 на 2 скорость
Запускается таймер на время переключения MTR_CONFIG.IMPTIME.
Сформирована команда «Включить» к скорости 2. При этом контролируется время MTR_CONFIG.IMPTIME.
Если за время MTR_CONFIG.IMPTIME скорость 2 не включилась, то осуществляется сброс текущего задания, формируется задание на включение 1 скорости, выдается команда «Включить» к скорости 1 и начинается отсчет нового времени MTR_CONFIG.IMPTIME. Если за время MTR_CONFIG.IMPTIME скорость 1 не перешла в состояние «Включена» или истек таймер MTR_CONFIG.IMPTIME, то происходит сброс текущего задания и формирование задания «Отключить».
Если за время MTR_CONFIG.IMPTIME скорость 2 включилась, то происходит переход к состоянию «Скорость 2» и сброс задания.
Выход TIMEOUT показывает время до завершения состояния «Переключение». Причем, состояние «Переключение» обычно завершается до истечения таймера.
Если по завершению импульса переключения не произошло, диагностируется ошибка.
5. Текущее состояние «Скорость 2»
Входная команда «Включить скорость 1» формирует задание на включение скорости 1 и выключение скорости 2. При этом контролируется время переключения MTR_CONFIG.IMPTIME. Если за время MTR_CONFIG.IMPTIME скорость 2 выключилась, то происходит переход в состояние "Переключение", иначе - формируется сброс задания.
6. Текущее состояние «Переключение» с 2 на 1 скорость
Запускается таймер на время торможения STP_TIME.
Запускается таймер на время переключения MTR_CONFIG.IMPTIME.
Пока не истекло время STP_TIME команда включения скорости 1 не формируется. После истечения таймера STP_TIME на выходе MTR1_ON_CTL формируется команда «Включить». При этом контролируется время переключения MTR_CONFIG.IMPTIME.
Если за время MTR_CONFIG.IMPTIME скорость 1 не включилась, то происходит сброс текущего задания, формируется задание на включение 2 скорости, выдается команда «Включить» скорости 2 и начинается отсчет нового времени MTR_CONFIG.IMPTIME. Если за время MTR_CONFIG.IMPTIME скорость 2 не перешла в состояние «Включена» или истек таймер MTR_CONFIG.IMPTIME, то осуществляется сброс текущего задания и формируется состояние «Отключен».
Если за время MTR_CONFIG.IMPTIME скорость 1 включилась, то осуществляется переход к состоянию «Скорость 1» и сброс задания.
Выход TIMEOUT показывает время до завершения состояния «Переключение». Причем, состояние «Переключение» обычно завершается до истечения таймера.
Если по завершению импульса переключения не произошло, диагностируется ошибка.