5.5.2.2.5.4.3.1. Алгоритм
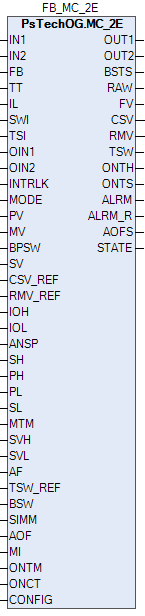
Двухпозиционный блок управления мотором с расширенными функциями MC_2E применяется для управления насосами и клапанами с электроприводами. Данный блок может использоваться для запуска или остановки двигателей, а также для автоматического контроля и управления их работой.
В блоке предусмотрена функция управления насосами и клапанами с электроприводом. Данный блок использует функции контроля и управления для управления запуском и остановкой двигателей. Также сочетание данного блока с функцией логического управления позволяет реализовать автоматическое управления двигателями.
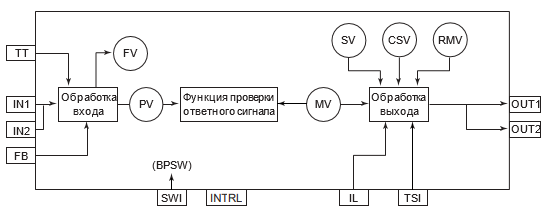
Функциональная блок-схема:
Методы доступа к входам/выходам и адресаты соединения входов/выходов блока:
|
Вход/Выход
|
Метод доступа
к входам/
выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/
вывода ПЛК
|
Переменные
внешней
логики
|
Входы/выходы функциональных блоков
| |||
|
IN1
|
Вход 1 ответа
|
Запись
|
x
|
x
| |
|
IN2
|
Вход 2 ответа
|
Запись
|
x
|
x
| |
|
OUT1
|
Управляемый выход 1
|
Чтение
|
x
|
x
| |
|
OUT2
|
Управляемый выход 2
|
Чтение
|
x
|
x
| |
|
FB
|
Входной сигнал обратной связи
|
Запись
|
x
|
x
| |
|
TT
|
Входной сигнал от термореле
|
Запись
|
x
|
x
| |
|
IL
|
Входной сигнал блокировки работы
|
Запись
|
x
|
x
| |
|
SWI
|
Вход переключателя байпаса
|
Запись
|
-
|
x
|
x
|
|
TSI
|
Вход переключателя слежения
|
Запись
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Назначение блока управления мотором (MC_2E)
Блок MC_2E выполняет обработку входа, вычислений, выхода и аварийной сигнализации.
Список доступных типов обработки входа функционального блока MC_2E:
Двухпозиционный вход состояния
Трехпозиционный вход состояния
Предельное значение PV
Список доступных типов обработки выхода функционального блока MC_2E:
Двухпозиционный выход состояния
Двухпозиционный импульсный выход
Список доступных тревог функционального блока MC_2E:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по перегреву (TRIP)
Сигнализация несоответствия ответа (PERR)
Ошибка ответа + (ANS+)
Ошибка ответа - (ANS-)
Сигнализация по блокировке (INT)
Сигнализация нарушения соединения (CNF)
Список доступных режимов функционального блока MC_2E:
Список доступных состояний функционального блока MC_2E:
Нормальное состояние (NR).
Состояние симуляции (SIM)
Состояние блокировки (LOCK)
Нерабочее состояние (OFF)
Состояние запрета проверки ответа (ANCK)
Подробная информация об обработке вxода в разделе
Подробная информация об обработке выxода в разделе
Подробная информация об обработке аварийной сигнализации в разделе
Подробная информация по режиму запрета обслуживания в разделе
|
Обработка входа, характерная для блока управления двигателем MC_2E
Блок выполняет специальные преобразования входного сигнала.
Подробная информация об обработке входа в блоках управления моторами в разделе
|
Обработка управляющих вычислений
Функции обработки управляющих вычислений:
|
Обработка управляющих вычислений
|
Описание
|
|
Проверка ответного сигнала
|
Сравнение значения входа ответного сигнала (PV) со значением управляющего выхода (MV) для проверки соответствия между работой исполнительного элемента и выходными сигналами блока управления двигателем.
|
|
Ручная инициализация
|
Смена режима блока на IMAN для временной остановки управляющего действия. Данная функция работает в случае создания условия ручной инициализации.
|
|
Аварийный переход на ручной режим
|
Изменение режима блока на MAN для принудительной остановки управляющего выхода. Данная функция работает при выполнении условия аварийного перехода на ручной режим.
|
|
Неисправность удаленной подсистемы
|
Временно приостанавливается автоматическое управление, и происходит переключение в резервный режим при обнаружении ошибки в удаленной подсистеме в то время, как функциональный блок работает в режиме RCAS или ROUT. Данное действие реализуется, когда удовлетворяется условие сбоя в работе удаленной подсистемы.
|
|
Блокировка изменения режима блока
|
Остановка управляющего действия функциональных блоков, работающих в автоматическом режиме, с блокировкой перехода остановленных функциональных блоков в автоматический режим.
|
|
Счетчик запусков
|
Подсчет числа изменений значения управляющего выхода с “0” на “2” или с “1” на “2” и использование полученного значения в качестве числа запусков (OCNT).
|
|
Время работы
|
Суммирование промежутков времени нахождения значения управляющего выхода (MV) в состоянии “1” или "2" и использование полученного значения в качестве времени работы.
|
|
Функция симуляции
|
Имитирует внутреннюю обработку блоков управления двигателем.
|
|
Переключатель команды байпаса
|
Обход функций в соответствии с состоянием переключателя команды байпаса.
|
Подробная информация об обработке вычислений в блоках управления моторами в разделе
|
Обработка выхода, характерная для блока управления двигателем MC_2E
Блок MC_2E выполняет обработку выходного сигнала, отличную от обработки, производимой другими функциональными блоками.
Ниже перечислены типы специальной обработки выходного сигнала в данном блоке:
Задание управляющего выхода (MV)
Преобразование выходного сигнала
Шаговый выход
Внешний/местный выход
Отслеживание ответного сигнала
Проверка блокировки
Отслеживание выхода
Подробная информация об обработке выхода в блоках управления моторами в разделе
|
Обработка аварийной сигнализации, характерная для блока управления двигателем MC_2E
Ниже перечислены типы специальной обработки аварийной сигнализации блока MC_2E:
Проверка сигнализации по верхнему и нижнему пределу сигнала обратной связи
Проверка сигнализации устройства отключения по температуре
Проверка сигнализации блокировки
Проверка сигнализации отклонения ответного сигнала
Проверка сигнализации ошибки ответного сигнала
Подробная информация об обработке сигнализации в блоках управления моторами в разделе
|