
5.5.2.4.7.7.1. Алгоритм
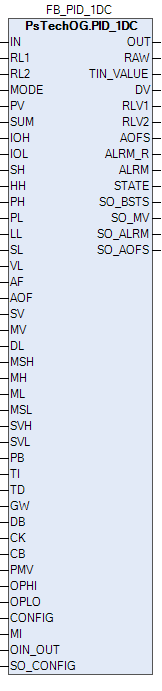
Технологический функциональный блок PID_1DC выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Функция ограничения сброса выполняет коррекцию расчета ПИД-управляющих воздействий, используя значение, считанное с адресатов соединений через клеммы RL1 и RL2.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
| |
|
Принудительный запрет формирования некоторых тревог по ремонтируемому оборудованию.
| |
|
Предотвращает резкое изменение управляющего воздействия MV при переходе режима с ручного MAN на автоматический AUT путем приравнивания значения задания SV к переменной процесса PV.
|
В данном разделе описывается функция стандартного программного модуля PID_1DC для систем АСУТП. Данный программный модуль будет использоваться для выполнения функции непрерывного контроля через ПИД-алгоритм. Этот программный модуль может быть связан с другим типовым элементом, например:
AI
GCF (расход с компенсацией по температуре и давлению)
GCF_SQ (расход с компенсацией по температуре и давлению — извлечение квадратного корня)
Список доступных режимов:
Список доступных тревог:
Нормальное состояние (NR)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения 2-го верхнего предела (HH)
Сигнализация достижения 2-го нижнего предела (LL)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Скоростная сигнализация + (VEL+)
Скоростная сигнализация - (VEL-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
Функциональная блок-схема
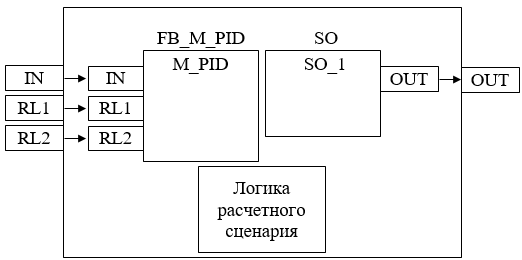
Состав элементов блока:
Блок FB_M_PID базового типа M_PID выполняет действие ВКЛ/ВЫКЛ в зависимости от значений SVH и SVL и отклонения переменной процесса (PV) от уставки (SV).
Подпрограмма логики расчетного сценария используется для расчета зазора и уставки на основании заданных значений SVH и SVL.
Методы доступа к входам/выходам и адресаты блока:
|
Вход/
Выход
|
Метод доступа
к входам/
выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/
вывода ПЛК
|
Переменные
внешней
логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
OUT
|
Выход
|
Чтение
|
x
|
-
| |
x: соединение разрешено
-: соединение запрещено
Основные функции
функция контроля с использованием ПИД-алгоритма
ошибка аналогового входа и выхода
запрет технического обслуживания измерения
останов технологического процесса (связанный с положением клапана и выключателем безопасности)
Подробное описание
Нормальные условия эксплуатации: ПИД-регулятор работает с цифровым сигналом вместо аналогового выхода. Старший оператор должен задать значения SVH и SVL в окне настройки, а уставка и зона нечувствительности будут вычислены на основании значений SVH и SVL. ПИД-регулятор с бесконечным коэффициентом усиления используется для быстрого изменения выходного сигнала на минимальное и максимальное значения для выполнения действия ВКЛ/ВЫКЛ.
Данный регулятор обычно используется для управления температурой в сосуде. Выходной сигнал устанавливается на 1, когда достигается нижний порог (нижняя температура), для включения нагревателя, а на 0, только когда достигается верхний порог (верхняя температура), для выключения нагревателя. Когда регулятор работает в режиме РУЧН оператор может управлять нагревателем путем изменения выходного сигнала регулятора.
Переход с режима АВТО (КАСКАД) на режим РУЧН: Окончательное значение выхода не изменяется, так как окончательное значение выхода согласуется с последним вычисленным значением. Переход с режима РУЧН на режим АВТО (КАСКАД): Окончательное значение выхода не изменяется до тех пор, пока отклонение (измерение PV — уставка) не превысит зону нечувствительности.
Состояние ошибки аналогового выхода: Разомкнутый выход OOP активирован, когда контур разомкнут или в случае неисправности соответствующей платы.
Функция запрета технического обслуживания: Когда соответствующее измерение запрещено, ПИД-алгоритм отключается, а окончательное значение выхода фиксируется на последнем вычисленном окончательном значении выхода. ПИД-регулятор принудительно переключается в режим РУЧН, и оператор может изменить окончательное значение выхода.
Останов технологического процесса: Возможны два варианта:
В случае защитной блокировки выход ПИД-регулятора будет принудительно настроен на заданное состояние, и доступ оператора будет запрещен до отключения блокировки.
Для блокировки технологического процесса на выход ПИД-регулятора передается эталонное значение с помощью короткого импульса 2 с, при этом доступ оператора разрешен.