
5.5.2.3.4.9.1. Алгоритм
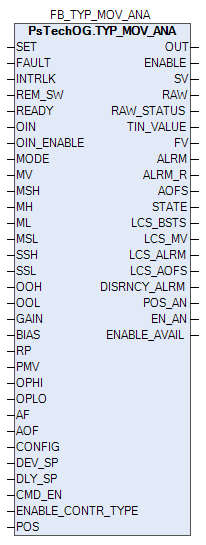
Функциональный блок TYP_MOV_ANA выполнен на основе базового функционального блока MLD_SW и, соответственно, наследует его функции.
|
Функция
|
Описание
|
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (MH, ML) для обработки тревог блока.
|
Функциональный блок TYP_MOV_ANA обеспечивает возможность ручной загрузки управляющей переменной в модуль аналогового вывода или последовательный канал связи.
Блок TYP_MOV_ANA выбирает управляющий выходной сигнал для передачи на аналоговый выходной модуль или последовательный канал связи, переключаясь между выходным сигналом, полученным от другого блока управления, и собственным выходным сигналом, сформированным вручную.
Список доступных режимов функционального блока TYP_MOV_ANA:
В ручном режиме (MAN) блок выдает на выход значение, установленное на АРМ оператора в качестве управляющего выходного сигнала (MV) для управления конечным элементом управления. В каскадном режиме (CAS) блок выполняет вычислительную обработку значения, поступающего на вход от другого функционального блока, и выдает результат в виде выходной управляющей величины (MV).
Если на арматуру действует технологическая или защитная блокировка (вход INTRLK = TRUE) при наличии сигнала готовности (вход READY = TRUE) и нахождении переключателя "МЕСТН./ДИСТ." в положении "ДИСТ." (вход REM_SW = TRUE), то блок переходит в предопределенное состояние (задается с помощью параметра PMV на АРМ оператора в окне настроек блока) и меняет режим на MAN TRK.
Если арматура находится в местном режиме (переключатель "МЕСТН./ДИСТ." в положении "МЕСТН.", вход REM_SW = FALSE) или по арматуре отсутствует готовность (вход READY = FALSE), то блок переходит в режим отслеживания TRK (MAN TRK или CAS TRK) и в качестве управляемой переменной MV устанавливается значение датчика положения, подключаемого ко входу POS. При отсутствии датчика положения в параметре MV фиксируется последнее значение.
При наличии сигнала неисправности арматуры (вход FAULT = TRUE) блок принудительно переходит в ручной режим и в параметре MV фиксируется последнее значение.
Управление выходом команды разрешения от оператора
Управление выходом ENABLE осуществляется на АРМ оператора в окне разрешения от оператора, которое вызывается при нажатии на индикатор режима управления (R/L) мнемосимвола блока. Доступность управления выходом ENABLE для типов управления "МЕСТН." и "ДИСТ." зависит от настройки конфигурационного параметра ENABLE_CONTR_TYPE (тип управления, при котором формируется выход ENABLE) типа ENUM_CONTR_TYPE, для которого возможны следующие значения:
LOCAL (местный режим). Управление доступно при нахождении переключателя арматуры в положении "МЕСТН.". При этом при нахождении переключателя задвижки в положении "ДИСТ." выход ENABLE принудительно переводится в FALSE.
REMOTE (дистанционный режим). Управление доступно при нахождении переключателя арматуры в положении "ДИСТ.". При этом при нахождении переключателя задвижки в положении "МЕСТН." выход ENABLE принудительно переводится в FALSE.
ALL (оба режима). Управление доступно в обоих режимах.
NONE (без участия оператора). Управление от оператора недоступно в обоих режимах. При этом при нахождении переключателя арматуры в положении "ДИСТ." выход ENABLE принудительно переводится в TRUE, а в положении "МЕСТН." выход ENABLE принудительно переводится в FALSE.
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
Список доступных тревог:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
В случае состояния данных PFAL выходного канала автоматически формируется сигнал тревоги OOP.
Подробная информация об отказе выхода в разделе
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP.
Функциональная блок-схема
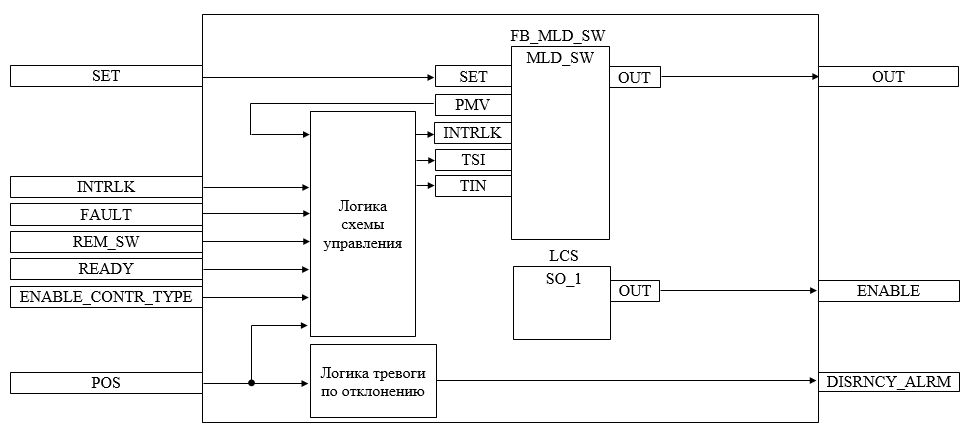
Состав элементов блока:
Блок FB_MLD_SW базового типа MLD_SW используется для обработки окончательного значения выхода для арматуры.
Блок LCS базового типа SO_1 используется для формирования команды разрешения (выход ENABLE) от оператора.
Подпрограмма логики схемы управления используется для формирования режима отслеживания TRK с значением для отслеживания, для управления блоком LCS в зависимости от конфигурационного параметра ENABLE_CONTR_TYPE и для формирования обобщенных сигналов блокировки и неисправности привода задвижки.
Подпрограмма логики тревоги по отклонению используется для генерирования сигнала отклонения между заданием положения на арматуру и значением положения арматуры.
Методы доступа к входам/выходам и адресаты соединения:
|
Вход/Выход
|
Метод доступа
к входам/выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/вывода ПЛК
|
Переменные
внешней логики
|
Входы/выходы функциональных блоков
| |||
|
SET
|
Вход задания
|
Запись
|
-
|
x
|
x
|
|
FAULT
|
Неисправность
|
Запись
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
|
REM_
SW
|
Переключатель "МЕСТН./ДИСТ."
|
Запись
|
x
|
x
| |
|
READY
|
Готовность
|
Запись
|
x
|
x
| |
|
POS
|
Положение клапана
|
Запись
|
-
|
x
|
x
|
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено