5.5.2.4.7.2.1. Алгоритм

Технологический функциональный блок PID_IL выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Функция ограничения сброса выполняет коррекцию расчета ПИД-управляющих воздействий, используя значение, считанное с адресатов соединений через клеммы RL1 и RL2.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
| |
|
Принудительный запрет формирования некоторых тревог по ремонтируемому оборудованию.
| |
|
Предотвращает резкое изменение управляющего воздействия MV при переходе режима с ручного MAN на автоматический AUT путем приравнивания значения задания SV к переменной процесса PV.
|
В данном разделе описывается программная функция для стандартного программного модуля ПИД-регулятора с блокировкой для систем АСУТП. Данный программный модуль будет использоваться для сбора результатов измерений и выполнять функцию непрерывного контроля через ПИД-алгоритм.
Программный модуль может быть связан с другим типовым элементом, например:
AI
GCF (расход с компенсацией по температуре и давлению)
Список доступных режимов:
Список доступных тревог:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения 2-го верхнего предела (HH)
Сигнализация достижения 2-го нижнего предела (LL)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Скоростная сигнализация + (VEL+)
Скоростная сигнализация - (VEL-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
Функциональная блок-схема
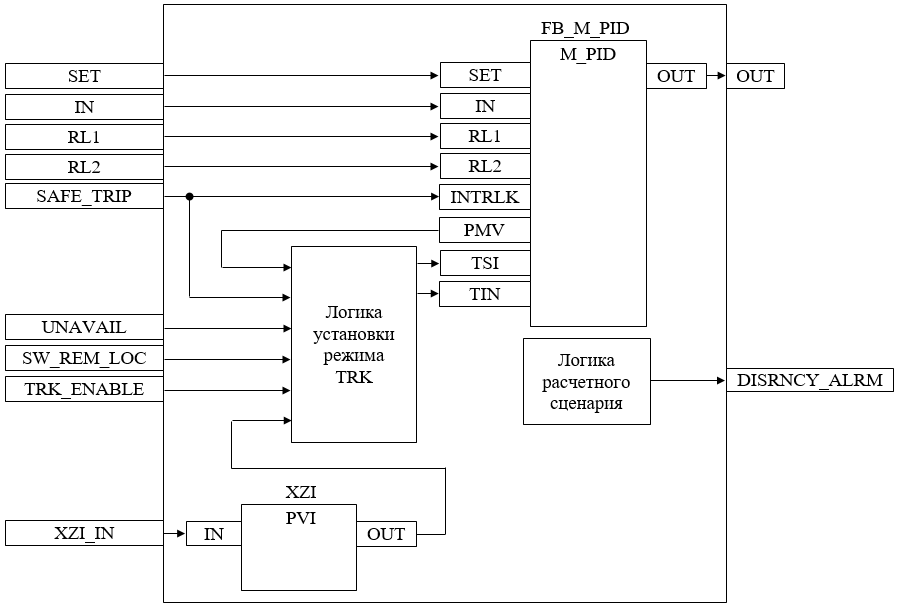
Состав элементов блока:
Блок FB_M_PID базового типа M_PID обеспечивает функцию пропорционально-интегрально-дифференциального регулирования с учетом отклонения технологической переменной (PV) от значения уставки (SV).
Подпрограмма логики расчетного сценария используется для генерирования аварийного сигнала отклонения.
Подпрограмма логики установки режима TRK используется для формирования режима отслеживания и формирования значения входа отслеживания TIN блока FB_M_PID в зависимости от входного защитного сигнала (SAFE_TRIP).
Методы доступа к входам/выходам и адресаты блока:
|
Вход/Выход
|
Метод доступа
к входам/
выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/
вывода ПЛК
|
Переменные
внешней
логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
OUT
|
Выход
|
Чтение
|
x
|
x
| |
|
SAFE_TRIP
|
Защита
|
Запись
|
x
|
x
| |
|
XZI_IN
|
Вход обратной связи положения
|
Запись
|
x
|
x
| |
x: соединение разрешено
-: соединение запрещено
Основные функции
функция контроля с использованием ПИД-алгоритма
ошибка аналогового входа и выхода
запрет технического обслуживания измерения
автоматическая маскировка аварийного сигнала
останов технологического процесса (связанный с положением клапана и выключателем безопасности)
представление в HMI
Подробное описание
Регулировка выхода:
Для закрытых при отказе клапанов FC, -- 0% для закрытия (4 мА) 100% для открытия (20 мА)
Для открытых при отказе клапанов FO, -- 0% для закрытия (20 мА) 100% для открытия (4 мА)
Ручной режим: ПИД-алгоритм отключается, и оператор может задать окончательное значение выхода MV. Уставка SV отслеживает значение измерения PV, если в среде Astra.IDE конфигурационный параметр CONFIG.BASIC.MEAS_TRACK_MAN установлен на значение TRUE. Отслеживание уставки можно отменить, установив в среде Astra.IDE конфигурационный параметр CONFIG.BASIC.MEAS_TRACK_MAN на значение FALSE.
Автоматический режим: ПИД-алгоритм функционирует с уставкой оператора SV.
Также переход в режим отслеживания (TRK) происходит по одному из условий:
- Переключатель "ДИСТ./МЕСТН." в положении "МЕСТН." (вход SW_REM_LOC = TRUE);
- Состояние "Недоступен" блока (вход UNAVAIL = TRUE);
Переход в режим отслеживания (TRK) не по причине защитной блокировки может быть заблокирован с помощью конфигурационного параметра TRK_ENABLE = FALSE.
Алгоритмом предусмотрена возможность «безударного» перехода при переключении дискретных состояний МЕСТНЫЙ/ДИСТАНЦИЯ. В режиме МЕСТНЫЙ при отсутствии защитной блокировки происходит отслеживание управляемой переменной MV по значению позиционной обратной связи XZI.
Состояние ошибки аналогового выхода: Аварийный сигнал разомкнутого выхода OOP активирован, когда выходной контур разомкнут или в случае неисправности соответствующей платы.
Подробная информация об отказе выхода в разделе
|
Функция запрета технического обслуживания: Когда соответствующее измерение запрещено, ПИД-алгоритм отключается, а окончательное значение выхода фиксируется на последнем вычисленном окончательном значении выхода. Оператор не может изменить уставку SV, если она отслеживает значение измерения PV. ПИД-регулятор принудительно переключается в режим РУЧН, и оператор может изменить окончательное значение выхода MV.
Останов технологического процесса: в случае защитной блокировки (вход SAFE_TRIP = TRUE) блок перейдет в режим отслеживания MAN_TRK и его выход будет принудительно настроен на заданное состояние (на значение параметра PMV, установленное в окне параметров), при этом доступ оператора будет запрещен до отключения блокировки. При снятии сигнала защитной блокировки (вход SAFE_TRIP = FALSE) блок останется в ручном режиме MAN в состоянии ожидания команды от оператора на перевод блока в автоматический режим AUT.