5.5.2.3.6.4.1. Алгоритм
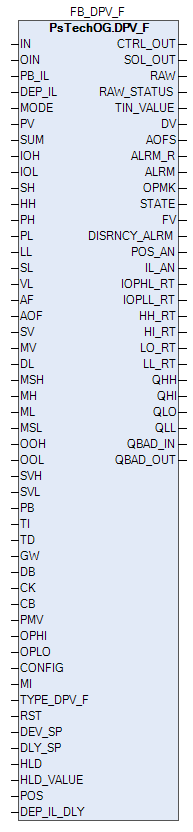
Функциональный блок DPV_F выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Формирование выхода OUT в зависимости от значения управляющего выхода (MV).
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
| |
|
Предотвращает резкое изменение управляющего воздействия MV при переходе режима с ручного MAN на автоматический AUT путем приравнивания значения задания SV к переменной процесса PV.
|
Описанная ниже логика применима для регулирующих клапанов с соленоидами РСУ, при наличии одной из блокировок – DEP или PB.
Если блокировка DEP_IL активируется, то после выдержки времени, задаваемой на входе DEP_IL_DLY, соленоид обесточивается, ПИД-регулятор переводится в режим MAN и выводится в безопасное положение (100% для клапанов FO и 0% для клапанов FC). При снятии блокировки DEP_IL соленоид остается обесточенным. Для подачи напряжения на соленоид необходимо выполнить сброс, нажав на значок соленойда на мнемосимволе. После сброса соленойд снова включается, а ПИД-регулятор переходит в режим MAN и выдает 0% для клапанов FO и 100% для клапанов FC).
Если активируется блокировка PB_IL, соленоид не обесточивается, ПИД-регулятор переводится в режим MAN и выводится в безопасное положение (100% для клапанов FO и 0% для клапанов FC). При отключении PB_IL соленоид остается в безопасном положении. Чтобы вывести соленойд из безопасного положения, необходимо выполнить сброс, нажав на значок соленойда на мнемосимволе. После сброса ПИД-регулятор переходит в режим MAN и выдает 0% для клапанов FO и 100% для клапанов FC).
Тип клапана зависит от заданной настройки на входе TYP_DPV_F. Если выбран тип клапана FO, то безопасным состоянием будет являться открытое состояние (100%). Если выбран тип клапана FС, то безопасным состоянием будет являться закрытое состояние (0%).
Также данный блок предназначен для выдачи сигналов защит, которые выполнены в виде защитных выходов QHH, QHI, QLO, QLL, QBAD_IN и QBAD_OUT, на внешнюю логику при формировании соответствующих тревог (HH, HI, LO, LL, IOP/IOP- и OOP).
С помощью включения режима технологического обслуживания (кнопка "Режим технологического обслуживания" в окне настроек блока на АРМ оператора) возможны блокировка защитных выходов QHH, QHI, QLO, QLL, QBAD_IN и QBAD_OUT при срабатывании тревог и принудительный переход в ручной режим MAN.
Список доступных режимов:
Задание уставки регулирования
Если блок находится в ручном режиме при запрете слежения в ручном режиме (конфигурационный параметр СONFIG.BASIC.MEAS_TRACK_MAN = FALSE), то уставка регулирования может быть задана в среде Astra.IDE через вход SV.DATA_VALUE блока DPV_F. При этом заблокирован ручной ввод уставки оператором из HMI (в окнах "Рабочее окно" и "Настройки").
Если блок находится в автоматическом режиме, то уставка регулирования может быть задана вручную оператором из HMI (в окнах "Рабочее окно" или "Настройки").
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
Список доступных тревог:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения 2-го верхнего предела (HH)
Сигнализация достижения 2-го нижнего предела (LL)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Скоростная сигнализация + (VEL+)
Скоростная сигнализация - (VEL-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
В случае неисправности входа (IOP/IOP-) или состояния данных BAD блок автоматически формирует сигнал тревоги IOP/IOP-. В случае данных тревог поведение блока зависит от конфигурационного входа HLD (удержание при отказе), для которого возможны следующие значения:
-1. Настройка с помощью CONFIG.INPUT.PV_OVERSHOOT. Для данного параметра возможны следующие значения:
TRUE. В переменную процесса PV записывается значение SL в случае тревоги IOP- и значение SH в случае тревоги IOP;
FALSE. Удерживается последнее достоверное значение переменной процесса PV.
0. Отключено. Масштабирование переменной процесса PV выполняется с формированием тревог по порогам;
1. Отключено с блокировкой тревог по порогам. Масштабирование переменной процесса PV выполняется без формирования тревог по порогам;
2. Удержание последнего значения. Удерживается последнее достоверное значение переменной процесса PV.
3. Подстановка HLD_VALUE. Значение входа HLD_VALUE записывается в переменную процесса PV.
4. Подстановка SL (обрыв) или SH (к.з.). В переменную процесса PV записывается значение SL в случае тревоги IOP- и значение SH в случае тревоги IOP.
В случае состояния данных выхода PTPF на блоке ПИД формируется сигнал тревоги OOP.
Подробная информация об отказе входа в разделе
Подробная информация об отказе выхода в разделе
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP .
Функциональная блок-схема
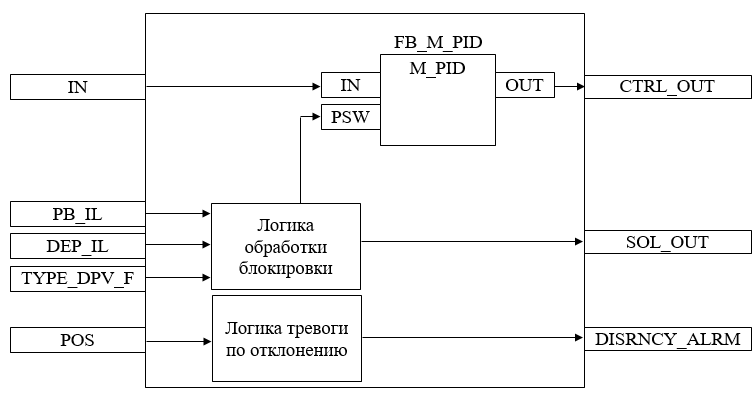
Состав элементов блока:
Блок FB_M_PID базового типа M_PID обеспечивает функцию пропорционально-интегрально-дифференциального регулирования с учетом отклонения технологической переменной (PV) от значения уставки (SV).
Подпрограмма логики обработки блокировки используется для управления выходом на соленоид клапана и переводом регулятора в соответствующее состояние в зависимости от значения конфигурационного входа TYPE_DPV_F.
Подпрограмма логики тревоги по отклонению используется для генерирования сигнала отклонения между заданием положения на клапан и значением положения клапана.
Методы доступа к входам/выходам и адресаты блока:
|
Вход/Выход
|
Метод доступа
к входам/
выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/
вывода ПЛК
|
Переменные
внешней
логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
CTRL_OUT
|
Управляющий выход
|
Чтение
|
x
|
x
| |
|
SOL_OUT
|
Выход на соленоид
|
Чтение
|
x
|
-
| |
|
PB_L
|
Вход блокировки от PB
|
Запись
|
x
|
x
| |
|
DEP_IL
|
Вход блокировки от DEP
|
Запись
|
x
|
x
| |
|
POS
|
Положение клапана
|
Запись
|
-
|
x
|
x
|
x: соединение разрешено
-: соединение запрещено