
5.5.2.3.6.5.1. Алгоритм
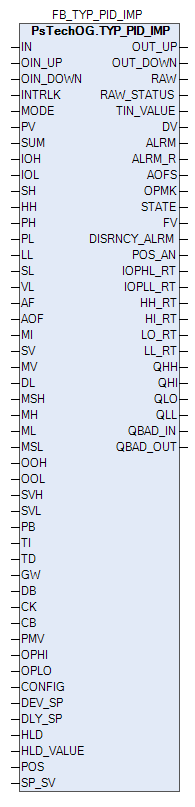
Функциональный блок TYP_PID_IMP выполнен на основе базового функционального блока M_PID и, соответственно, наследует его функции.
|
Функция
|
Описание
|
|
Обработка измерительного входа и формирование переменной процесса (PV).
| |
|
Значение PV не формируется по значению измерительного входа (IN), а задается оператором вручную. Реальное значение измерительного входа (IN) отслеживается по значению параметра необработанных данных (RAW).
| |
|
Реализация алгоритма ПИД управления.
| |
|
Формирование импульсных выходов OUT_UP и OUT_DOWN в режиме ШИМ при настройке "Преобразование в широтно-импульсный выходной сигнал".
| |
|
Обработка тревог блока и формирование списка сработавших тревог (ALRM_R) и состояния тревог (ALRM).
| |
|
Маскирование тревог, т.е. тревоги формируются, но не записываются в журнал событий.
| |
|
Проверка правильности задания уставок (HH, PH, PL, LL) для обработки тревог блока.
| |
|
Предотвращает резкое изменение управляющего воздействия MV при переходе режима с ручного MAN на автоматический AUT путем приравнивания значения задания SV к переменной процесса PV.
|
Блок TYP_PID_IMP использует функционал базового блока M_PID в части выдачи импульсных команд «Прибавить»/ «Убавить» (или «Открыть»/ «Закрыть», или «Вверх» / «Вниз») в режиме ШИМ (должен быть выбран тип преобразования выхода – «Преобразование в широтно-импульсный выходной сигнал»).
Функциональный блок ПИД-регулятора имеет на входе переменную процесса (PV). Значение переменной процесса (от 4 до 20 мА) поступает с поля через модуль аналогового ввода. Управляющие импульсные команды выводятся через каналы модуля дискретного вывода на регулирующий клапан.
Также данный блок предназначен для выдачи сигналов защит, которые выполнены в виде защитных выходов QHH, QHI, QLO, QLL, QBAD_IN и QBAD_OUT, на внешнюю логику при формировании соответствующих тревог (HH, HI, LO, LL, IOP/IOP- и OOP).
С помощью включения режима технологического обслуживания (кнопка "Режим технологического обслуживания" в окне настроек блока на АРМ оператора) возможны блокировка защитных выходов QHH, QHI, QLO, QLL, QBAD_IN и QBAD_OUT при срабатывании тревог и принудительный переход в ручной режим MAN.
Список доступных режимов функционального блока TYP_PID_IMP:
Отслеживание измерений задается только для режима MAN, чтобы обеспечить бесперебойный переход при смене режима с MAN на AUT.
Задание уставки регулирования
Если блок находится в ручном режиме при запрете слежения в ручном режиме (конфигурационный параметр СONFIG.BASIC.MEAS_TRACK_MAN = FALSE), то уставка регулирования может быть задана в среде Astra.IDE через вход SV.DATA_VALUE блока TYP_PID_IMP. При этом заблокирован ручной ввод уставки оператором из HMI (в окнах "Рабочее окно" и "Настройки").
Если блок находится в автоматическом режиме и отключен вход предустановленной уставки SP_SV (статус входа SP_SV – O/S), то уставка регулирования может быть задана вручную оператором из HMI (в окнах "Рабочее окно" или "Настройки"). Если вход предустановленной уставки SP_SV подключен (статус входа SP_SV не равен O/S), то значение уставки SV будет определяться предустановленным значением на входе SP_SV.
Инициализация
По умолчанию блок инициализируется в режиме MAN.
Функция сигнализации
Список доступных тревог функционального блока TYP_PID_IMP:
Нормальное состояние (NR)
Сигнализация размыкания выхода (OOP)
Высокая сигнализация размыкания входа (IOP)
Низкая сигнализация размыкания входа (IOP-)
Сигнализация достижения 2-го верхнего предела (HH)
Сигнализация достижения 2-го нижнего предела (LL)
Сигнализация достижения верхнего предела (HI)
Сигнализация достижения нижнего предела (LO)
Сигнализация по верхнему отклонению + (DV+)
Сигнализация по нижнему отклонению - (DV-)
Скоростная сигнализация + (VEL+)
Скоростная сигнализация - (VEL-)
Сигнализация избыточного значения выхода (MHI)
Сигнализация недостаточного значения выхода (MLO)
Сигнализация нарушения соединения (CNF)
В случае неисправности входа (IOP/IOP-) или состояния данных BAD блок автоматически формирует сигнал тревоги IOP/IOP-. В случае данных тревог поведение блока зависит от конфигурационного входа HLD (удержание при отказе), для которого возможны следующие значения:
-1. Настройка с помощью CONFIG.INPUT.PV_OVERSHOOT. Для данного параметра возможны следующие значения:
TRUE. В переменную процесса PV записывается значение SL в случае тревоги IOP- и значение SH в случае тревоги IOP;
FALSE. Удерживается последнее достоверное значение переменной процесса PV.
0. Отключено. Масштабирование переменной процесса PV выполняется с формированием тревог по порогам;
1. Отключено с блокировкой тревог по порогам. Масштабирование переменной процесса PV выполняется без формирования тревог по порогам;
2. Удержание последнего значения. Удерживается последнее достоверное значение переменной процесса PV.
3. Подстановка HLD_VALUE. Значение входа HLD_VALUE записывается в переменную процесса PV.
4. Подстановка SL (обрыв) или SH (к.з.). В переменную процесса PV записывается значение SL в случае тревоги IOP- и значение SH в случае тревоги IOP.
В случае состояния данных выхода PTPF на блоке ПИД формируется сигнал тревоги OOP.
Подробная информация об отказе входа в разделе
Подробная информация об отказе выхода в разделе
|
Индикация датчика положения
Индикация датчика положения активна, если к блоку подключен датчик положения. При измерении положения управляемого клапана при помощи датчика положения, подключаемого ко входу POS, значение положения клапана сравнивается со значением задания MV. В случае фиксации отклонения фактического измеренного положения клапана от задаваемого на величину (больше или равно) уставки DEV_SP на выходе блока (DISCRNCY_ALRM) будет формироваться тревога отклонения по истечении времени выдержки DLY_SP.
Функциональная блок-схема
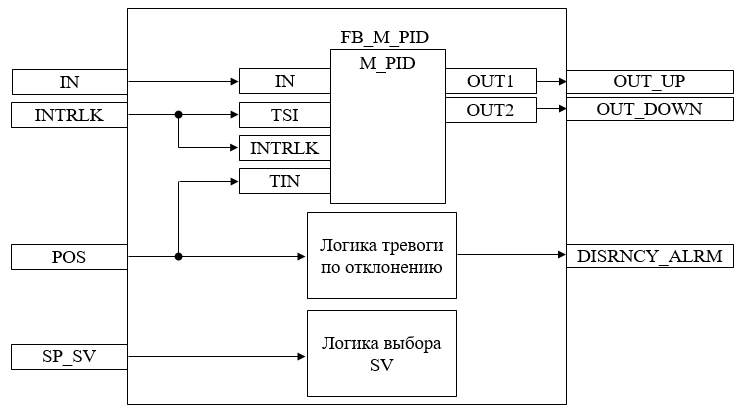
Состав элементов блока:
Блок FB_M_PID базового типа M_PID обеспечивает функцию пропорционально-интегрально-дифференциального регулирования с учетом отклонения технологической переменной (PV) от значения уставки (SV).
Подпрограмма логики выбора SV используется для реализации логики выбора задания уставки регулирования для блока YYY (от АРМ оператора или от входа предустановленной уставки SP_SV).
Подпрограмма логики тревоги по отклонению используется для генерирования сигнала отклонения между заданием положения на клапан и значением положения клапана.
Методы доступа к входам/выходам и адресаты блока:
|
Вход/Выход
|
Метод доступа
к входам/
выходам
|
Адресат соединения
| |||
|
Каналы модулей
ввода/
вывода ПЛК
|
Переменные
внешней
логики
|
Входы/выходы функциональных блоков
| |||
|
IN
|
Измерительный вход
|
Запись
|
x
|
x
| |
|
OUT_UP
|
Выход "Прибавить"
|
Чтение
|
x
|
x
| |
|
OUT_DOWN
|
Выход "Убавить"
|
Чтение
|
x
|
x
| |
|
INTRLK
|
Вход переключателя блокировки
|
Запись
|
x
|
x
| |
|
SP_SV
|
Вход предустановленной уставки
|
Запись
|
-
|
x
|
x
|
|
POS
|
Положение клапана
|
Запись
|
-
|
x
|
x
|
x: соединение разрешено
-: соединение запрещено